[Lecture Notes] UW-Madison CS537 Operating Systems
Lec 2. Processes
What is a process
- Execution stream (thread of control)
- Process state: everything code can affect or be affected
- including: PC, registers, memory, opened files, opened OS resources…
Process VS Program
Program: static data, code
- global or initialized variables
Process: dynamic instance of code + data
- registers, stack, heap, address space, all memory that is accessible
1 copy of program can have many copies of processes.
Virtualizing CPU
Goal: give each process the idea that it is running alone
How to do: share resources
- For CPU: time sharing (save/restore process state)
- reason we can do time sharing: small CPU/register state goes to memory
- For Memory: space sharing
Getting good performance
Direct execution: run directly on hardware. OS loads program, jumps to main.
Problem
- process could do something restricted – access another process or user file
- process could run forever – need to stop + take control
- process could do something slow – I/O… We want to use CPU for something else.
Solution: Limited Direct Execution(LDE)
Let OS+hardware have some control.
Problem 1: restricted operations
Solution: System calls
Solution: hardware privilege levels
user processes runs in restricted level (‘unprivileged’ or ‘user mode’)
OS runs in privileged level (‘kernel level’ or ‘kernel mode’)
What privileges?
- interact with devices (e.g. keyboard)
- interact with memory permissions (e.g. can access whole memory and control permissions in kernel mode)
How does a process do IO?
By System call:
- controlled transfer into OS
- change privilege levels
- implemented via Trap (to control where to jump)
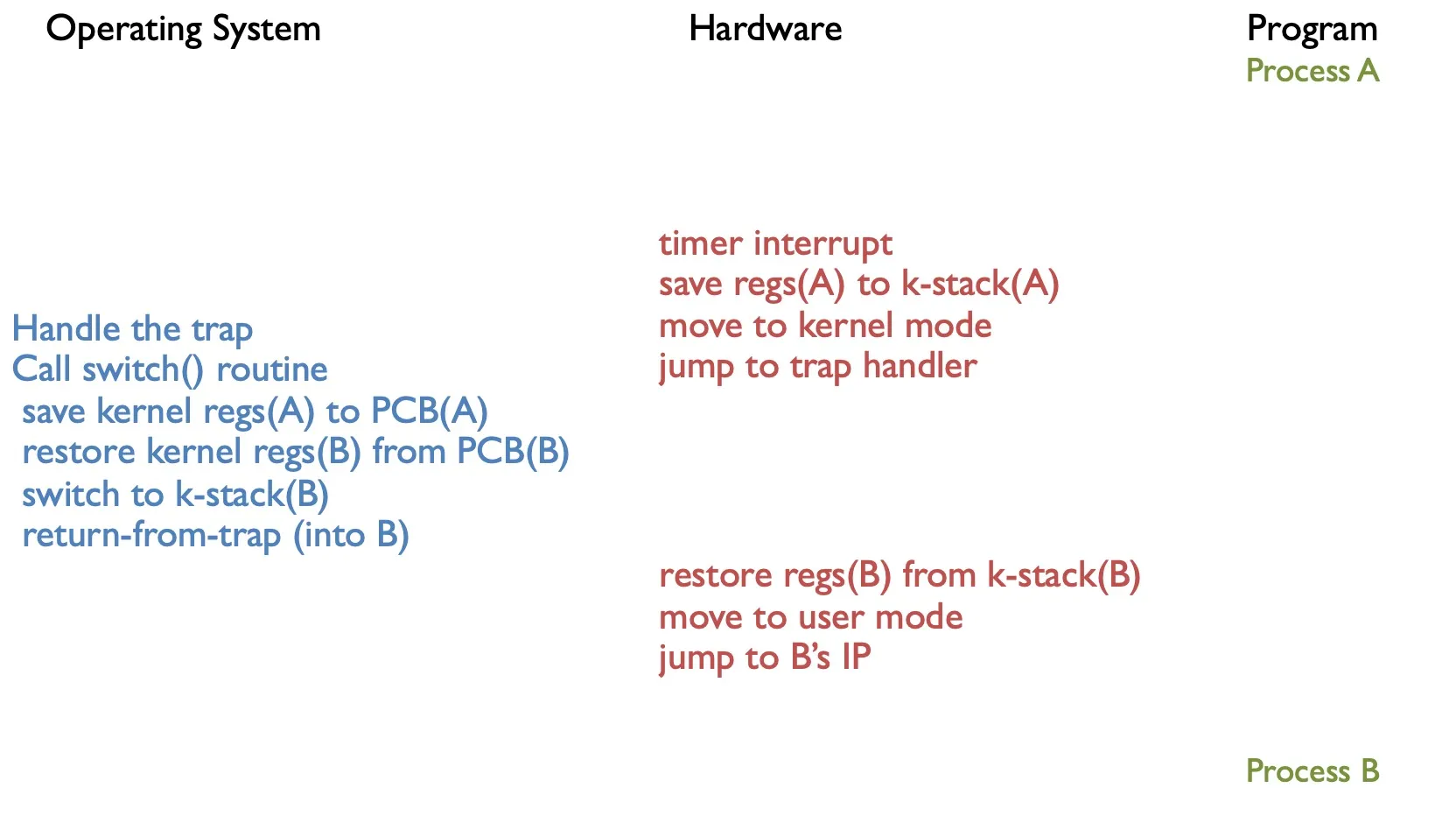
How to take CPU away? (take CPU away from a process / control how long a program can run)
Mechanism: trap to OS + registers save/restore
OS dispatch loop:
1 | |
Regain control
Option 1: Cooperative multitasking:
Trust process to relinquish CPU
- automatic on syscall
- extra syscall to
yield()
Benefits: no new OS mechanism
Drawbacks: lame programmers; not responsive
Option 2: Timer-based multitasking
Guarantee OS runs periodically
Set an alarm (timer)
- program timer to interrupt every 3ms
- interrupt causes trap + handler, invoke dispatch (dispatch can choose to switch process)
Save state
what: register state (including: GPR, PC, stack, frame(ebp))
where: process control block (PCB) (including: PID, process state, priority, register state, address space)
Lec 3. CPU Scheduling
Dispatcher - Switches between processes
- cooperative multitasking
- preemptive/true multitasking (has a timer)
saving state - called ‘context switching’
loading state
(During context switching, save process’s register to PCB)
(During system call, save to kernel stack)
(When process is descheduled, it’s moved to READY state)
fa19mid1
(The scheduler determines the policy for which process should be run when. The CPU dispatcher implements the mechanism)
fa16mid1
(On a system call trap, the hardware looks up the trap table. OS looks up the address of the system call handler in system call table.)
sp22mid1
Slow operations
I/O operations can take a long time. We should run other processes when one process is doing reading/writing files.
Idea: track state of processes
- Running: on CPU
- Ready: can run at any time
- Blocked / Waiting: Asleep, waiting for I/O.
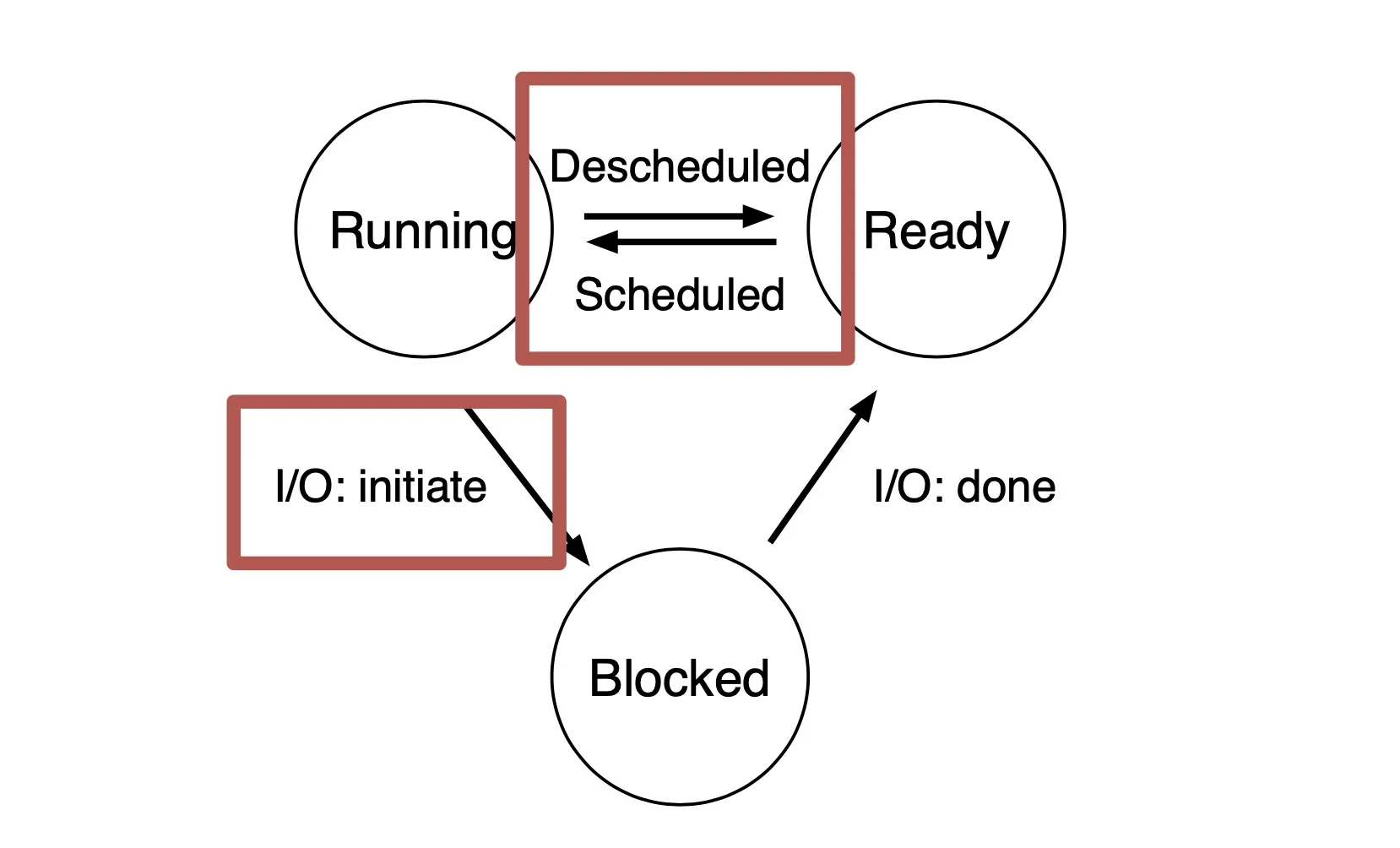
(When a job is descheduled by scheduler, it’s moved to READY)
(fa19mid1)
Policy
Workload: set of jobs and tasks: (arrival time, run time)
Job: current execution of a process. Alternates between CPU and IO.
Scheduler: decides which ready job to run
Metric: measurement of scheduling quality
Overhead 是什么? TODO
Metrics
Turnaround time = Completion time - arrival time
Response time = First run time - arrival time
Wait time = Time not scheduled between arrival and completion (fa19mid1)
Starvation: a process is prevented from making progress
Policies
FIFO / FCFS (First in first out / First come first serve)
- Run jobs in the order they arrive
- Turnaround time suffers when short jobs must wait for long jobs
SJF (Shortest job first)
- Run remaining job with shortest run time next. 不会打断当前job.
- Optimal for min turnaround time.
- 缺点: 新来的 short process 会被正在运行的 long process 挡住很长时间 (starvation) (convoy effect (fa16mid1))
FIFO and SJF are non-preemptive: only schedule new job when prev job voluntarily relinquishes CPU.
(If all jobs have same length, FIFO = SJF) (fa19mid1)
(将长job移到短job之后能降低turnaround time, 所以SJF能有更短的turnaround). (fa16mid1)
preemptive: schedule different jobs by taking CPU away from the running job
STCF (Shortest Time-to-Completion First)
- Always run job that will complete the quickest. 可能打断当前job.
- 如果不断有 short jobs arriving, 则当前的 long job 会 starve.
RR (Round Robin)
- Idea: switch more often to reduce response time
- RR 降低 response time, 但会增加 turnaround.
- (如果所有job长度相同, 则RR的turnaround time最差, 因为所有job都在最后才完成) (fa16mid1)
- (Increase the time slice of RR can decrease the overhead imposed by scheduling. 因为 context switch 的次数更少.) (fa19mid1)
The above are not IO aware (jobs hold on CPU while blocked on disk).
I/O aware scheduling
- Treat job A as separate CPU bursts. When A completes IO, another job A is ready.
MLFQ (Multi level feedback queue)
Support both
- interactive programs that care about response time
- batch programs care about turnaround time
multiple levels of round-robin
priority levels
can preempt them
Rules:
- If priority A > B, A runs.
- If priority A = B, A&B run in RR.
- Processes start at top priority.
- If job uses whold slice, demote process (longer time slices, lower priorities).
- CPU Burst: After some time period S, move all jobs to the topmost queue (avoid starvation).
- Lottery scheduling:
- give processes lottery tickets
- whoever wins runs
- higher priority → more tickets
(One of the goals is to support batch and interactive jobs) (sp22mid1)
(Gantt chart shows timeline of job scheduling)
Lec 4. Virtualization: CPU to Memory
Multicore scheduling
Single Global Queue
Advantages:
Low response time - new tasks can run on any CPU
Global priorities - new task can perrmpt any CPU running lower priority
Drawbacks:
- Expensive communication
- Loss of cache locality when job moves between CPUs
Multi-queue Scheduling (Per-CPU Queue)
Give each CPU core its own ready quene.
Tasks assigned to a CPU core when creation.
Placement policy: pick the core with shortest queue
Advantages: No cross-core migration & communication
Drawbacks: Load imbalance
Per-CPU queue with migration
Periodic rebalancer: move jobs from cores with many jobs to those with a few jobs
Run every few seconds (much less frequent as time slice) when load imbalance > 25%
Process Creation
Two ways to create a process
Option 1: New process from scratch (Windows)
Steps
- Load specified code and data into memory; Create empty call stack
- Create and initialize PCB (like context-switch)
- Put process on ready list
Advantages: no wasted work
Disadvantages: configuration complicated
Option 2: Copy an existing process and change it appropriately (*nix)
Lec 5. Segmentation and Paging
Static relocation
Dynamic relocation
Goal: protect processes from one another
Requires hardware support: Memory Management Unit (MMU)
Dynamic relocation by changing value of base register!
During context switch, add base and bound registers to PCB.
Base and bound disadvantages:
- must be allocated contiguously in physical memory
- must allocate memory that may not be used
- no partial sharing
(在dynamic relocation中, OS manages the mapping between virtual and physical memory. The OS allocates space in physical memory for each address space.) (fa16mid1)
(操作系统在物理内存中 allocate space, 编译器在虚拟内存中选择 virtual address) (fa19mid1)
(logical address = virtual address)
(fa15mid1)
Segmentation
Divide address space into logical segments, each segment corresponds to logical entity in address space (code, stack, heap)
Each segment has separate base + bound register.
MMU contains Segment Table (per process).
Advantages:
- sparse allocation.
- (stack and heap can grow independently)
Disadvantages:
- externel fragmentation
(Segmentation 不会增加额外的 memory references. ) (fa19mid1)
Lec 6. Paging - TLBs
Paging:
Goal: eliminate requirement that address space is contiguous
Idea: divide address spaces and physical memory into fixed-sized pages.
For each memory reference (steps):
Extract VPN from VA (virt addr)
Calculate addr of PTE (page table entry)
PTE address = VPN * PTE size + PTBR (page table base register)
Read PTE from memory
Extract PFN (page frame num / physical page number)
Build PA (phys addr)
Read contents of PA
Every instruction fetch/load/store takes 2 mem references. Slow!
Pros:
- No external fragmentation: any page can be placed in any phys addr
- Fast to allocate and free: No need to search for suitable free space; doesn’t need adjacent free space
Cons:
- Additional memory reference
- Storage for page tables may be substantial (PTE needed even if page not allocated)
TLB
Translation Lookaside Buffer (TLB)
TLB != PTE (In PTE, we don’t need VPN. In TLB we need.)
TLB is fully associative.
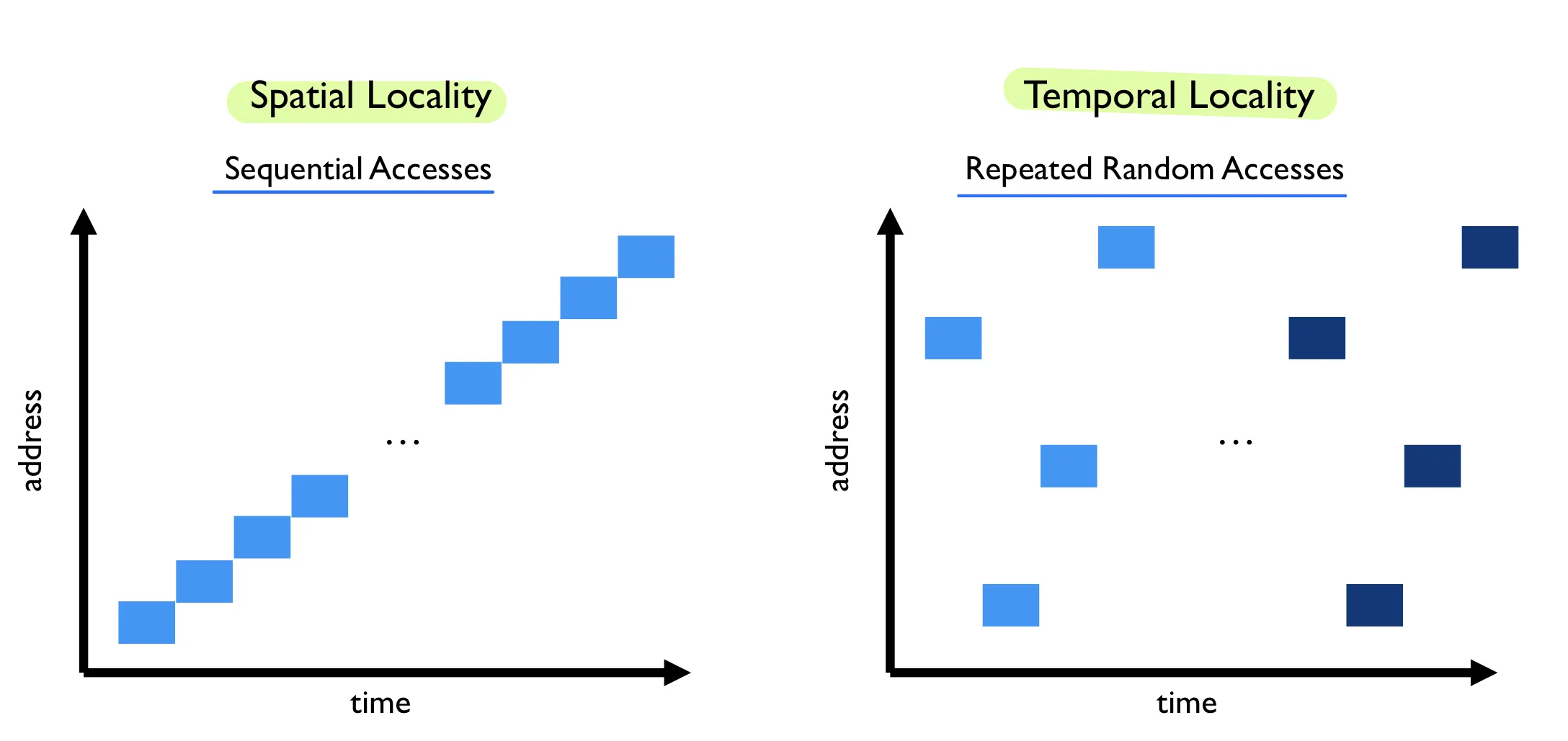
Locality
TLB replacement policies
- LRU: least recently used
- Random:
- sometimes random is better
On context switches
- Option 1: Flush TLB on context switch
- Option 2: Track which entries are for which process
- Tag each TLB entry with Address Space Identifier (ASID)
Hardware or OS handles TLB misses.
In practice we use hardware. Pagetable structure fixed and agreed between HW and OS. Hardware ‘walks’ pagetable and fills TLB. OS plays no role in TLB miss.
(page fault 的时候: present bit 是0)
(TLB Miss的时候是: 找不到entry或者entry的 valid bit 是0)
(fa16mid1)
(LRU多加一个page 表现会 equal or better)
(FIFO多加一个page 表现可能会更差: Belady’s anomaly)
(fa19mid1)
(Page table 里 valid but not present 是说page存在但是被swap到了硬盘上, 需要 trap OS to read disk)
Lec 7. Smaller pagetables
Multi-level page tables
Goal: allow page table to be allocated non-contiguously
Idea: page the page tables (multiple levels)
Each inner page table fits within a page.
Other approaches
- Inverted Page tables
Lec 8. Swapping
Lec 10. Concurrency
Motivation: 多核
Option 1: many communicating processes
Option 2: thread (同一个 process 的多个 thread 共享 address space)
Multi-threaded programs tend to be structured as
- Producer / Consumer
- Pipeline
- Defer work with background thread
Thread vs Process
Multiple threads within a single process share:
- PID
- Address space: code, most data (heap)
- open file descriptors
- current working directory
- User and group ID
Each thread has its own
- TID
- set of registers, including ip (instruction pointer) and sp (stack pointer)
- stack
OS support: approach
User-level threads: many-to-one thread mapping
- OS is not aware of user-level threads
- advantages: faster, does not require OS support
- disadvantages: cannot leverage multiprocessors; entire process blocks when one thread blocks
Kernel-level threads: one-to-one thread mapping
- OS provides each user-level thread with a kernel thread
- Each kernel thread scheduled independently.
- advantages: can run parallel on a multiprocessor; when one thread blocks, other threads can be scheduled
- disadvantages: higher overhead for thread operations; OS must scale well with increasing number of threads
Lec 11. Locks
Locks
- Allocate and initialize
Pthread_mutex_t mylock = PTHREAD_MUTEX_INITIALIZER
- Acquire
- Acquire exclusion access to lock
- wait if lock if not avaiable
- spin or block while waiting
Pthread_mutex_lock(&mylock)
- Release
- Release exclusive access to lock
Pthread_mutex_unlock(&mylock)
Lock implementation goals
- Correctness
- Mutual exclusion: 同一时刻只能有一个thread在critical section中
- Progress (deadlock-free): 不能死锁(大家都无法lock的现象)
- Bounded (starvation-free): 不能一直占用着锁
- Fairness: Each thread waits for same amount of time
- Performance: don’t waste CPU
Atomic operation: 原子操作
Approaches
Disable interrupts
- Prevent dispatcher from running another thread
- 仅可用于单核; Process可以永久占用CPU; 无法处理其它中断
Locks using loads/stores
single shared lock variable, 不行 (memory access not atomic + race condition)
XCHG (Atomic exchange or test-and-set)
int xchg(int *addr, int newVal) { int old = *addr; *addr = newVal; return old; } <!--code1-->
Fairness issue: scheduler is unaware of locks/unlocks
Ticket locks
Idea: reserve each thread’s turn to use a lock. Each thread spins until their turn
new atomic primitive, fetchAndAdd
1
2
3
4
5int fetchAndAdd(int *ptr) {
int old = *ptr;
*ptr = old + 1;
return old;
}Acquire: grab ticket, spin while thread’s ticket != turn
Release: advance to next turn
Ticket locks guarantee bounded waiting (bounded by the number of threads). (sp22mid2)
Spinlock performance
- Fast when: 多核; critical section short (lock held a short time)
- Slow when: 单核; lock held a long time
- advantage: avoid context switch
- disadvantage: spinning is wasteful; fairness issue
Waste of CPU cycles:
- Without yield: O(threads * time_slice)
- With yield: O(threads * context_switch)
Even with yield, spinning is slow with high thread contention
ticket lock 也属于 spin lock (fa16mid2)
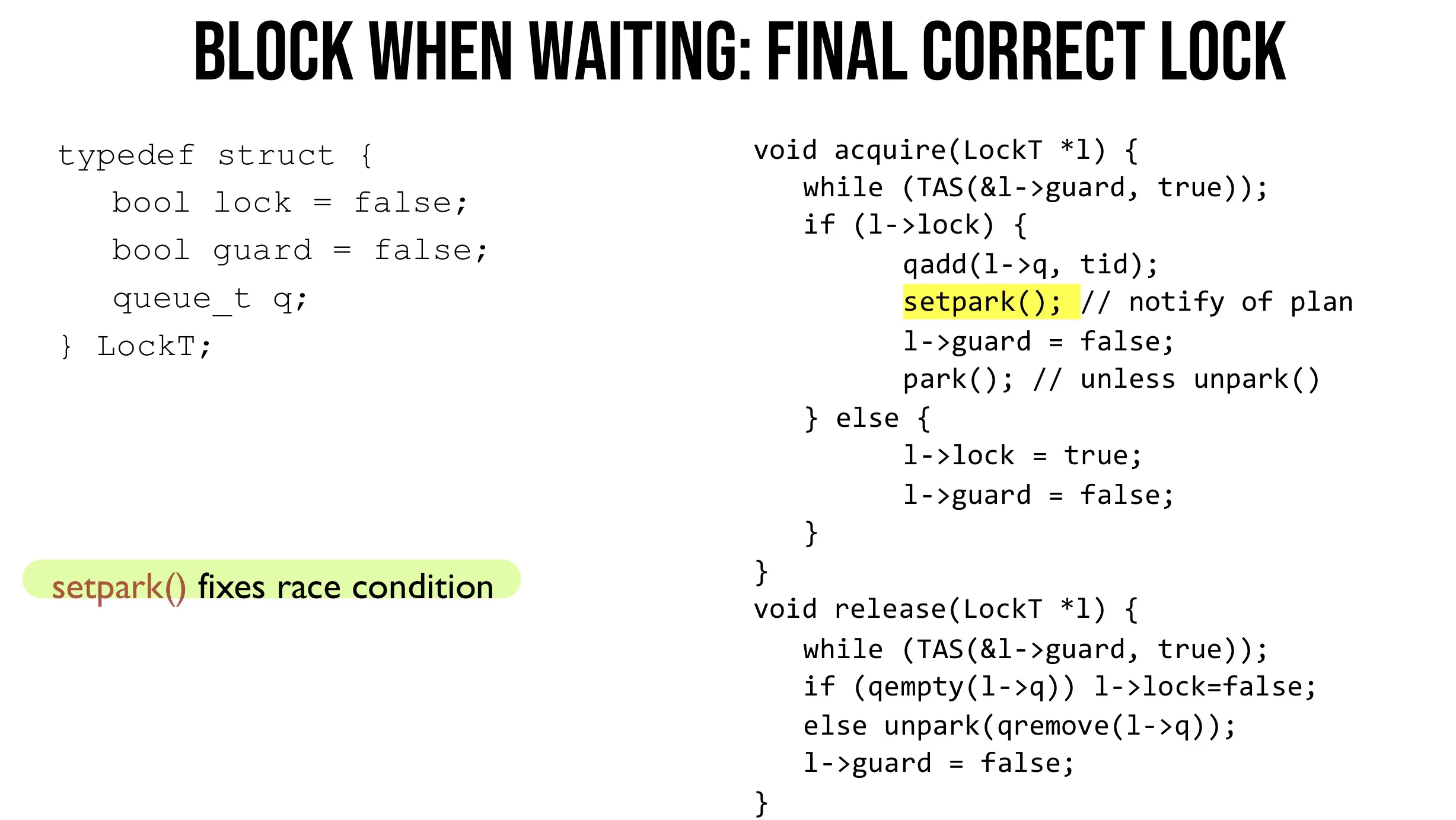
Blocking when waiting
Remove waiting threads from scheduler runnable quene (避免调度正在等候的threads)
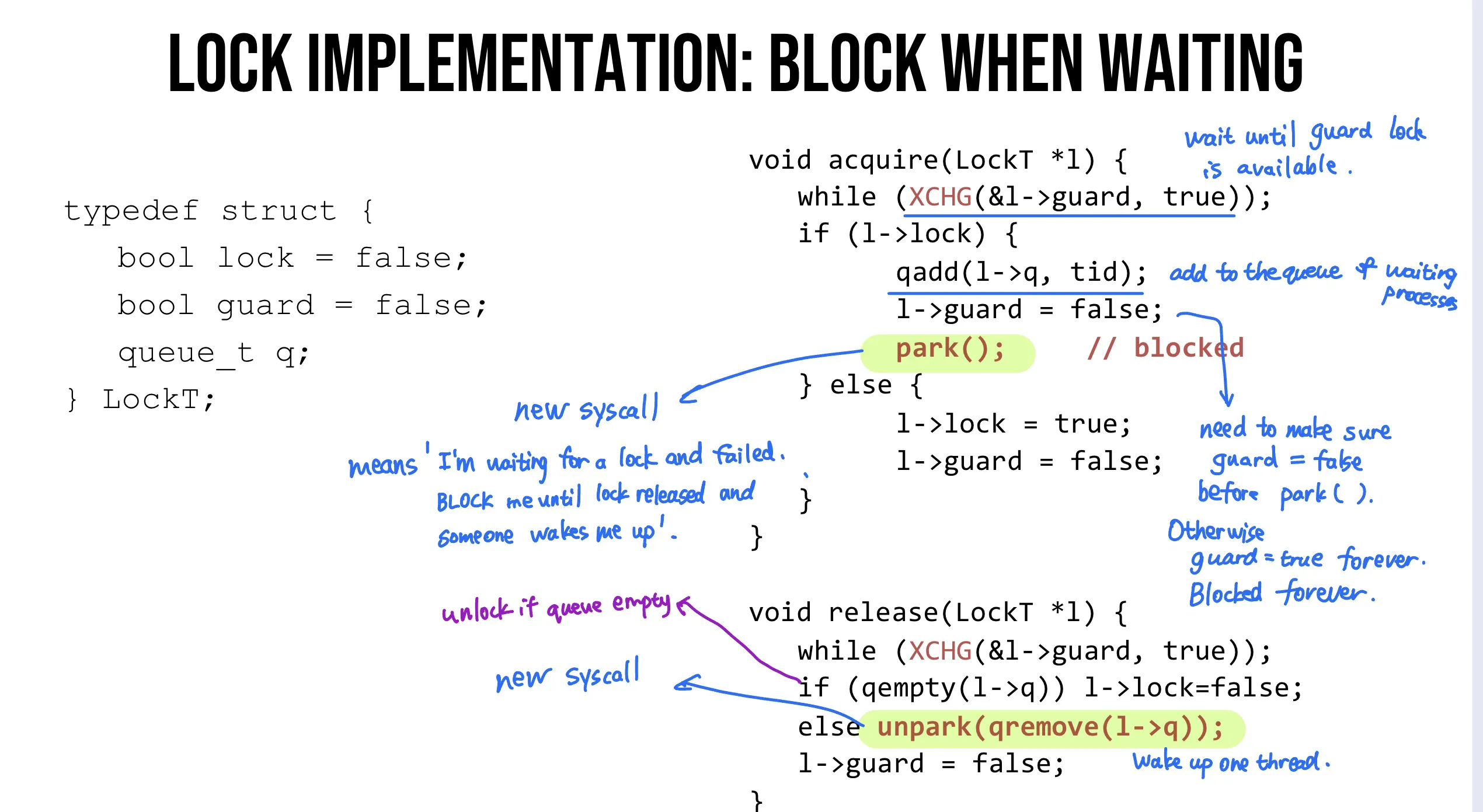
Spin-waiting VS Blocking
Uniprocessor 单核
- waiting process should always relinquish processor
- associate queue of waiters with each lock
Multiprocessor 多核
- spin or block depends on how long before lock is released
- lock released quickly (t < C) --> spin-wait
- lock released slowly (t > C) --> block
- C is context-switch cost
Two-phase waiting
Algorithm: spin-wait for C then block
Two cases:
- if actually < C, spin-wait for , we are same as optimal
- if actually > C, we pay spin C then block (twice as bad as optimal)
- worst-case performance bounded
2-competitive algorithm
Lec 12. Condition Variables
Concurrency objectives
- mutual exclusion (A和B不能同时运行)
- Solved with locks
- Ordering (B一定要在A之后运行)
- Solved with condition variables and semaphores
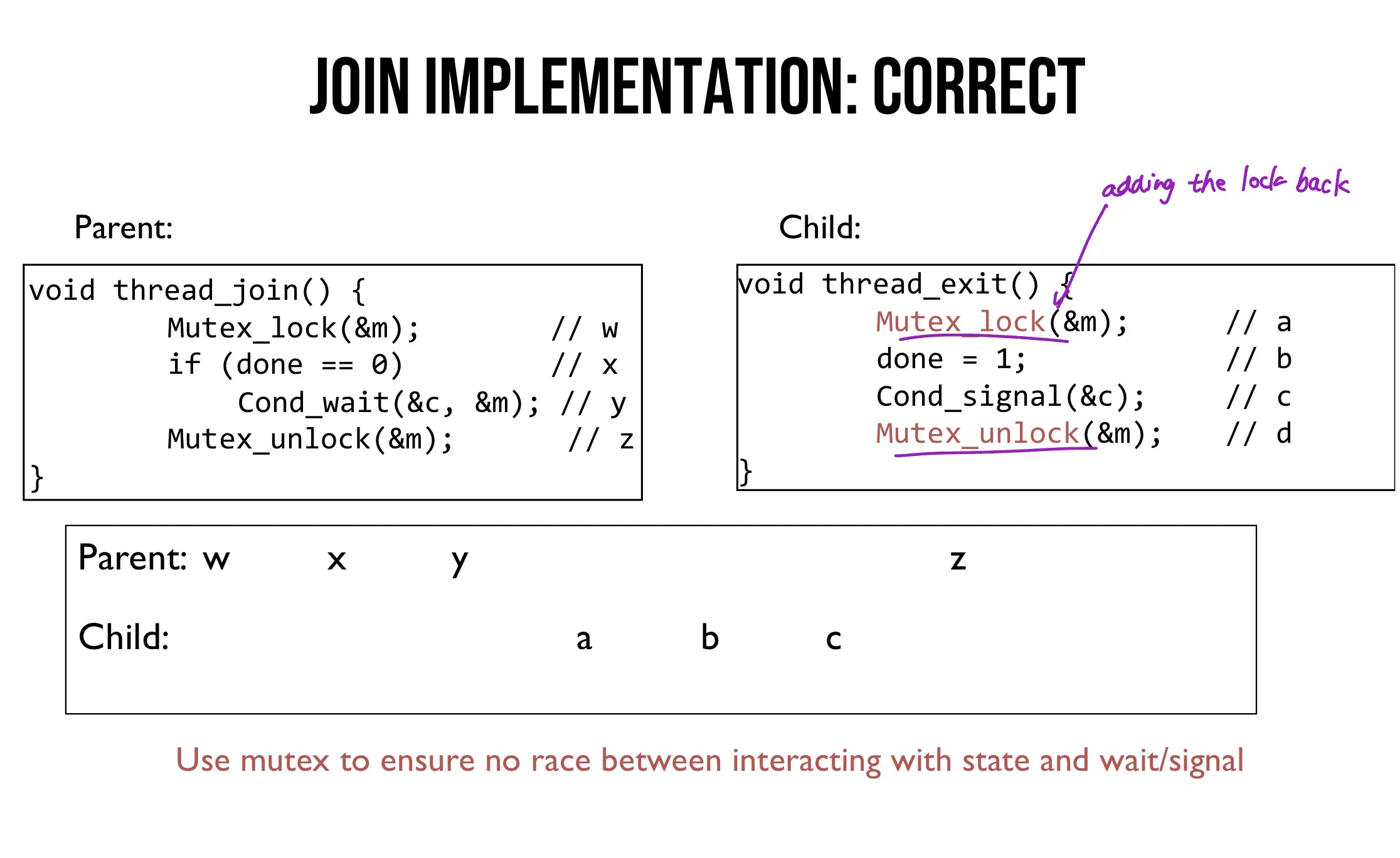
Condition variables
Condition variable: queue of waiting threads
waits for a signal on CV before running
sends signal to CV when time for B to run
- wait(cv, lock)
- requires the lock is held when wait() called
- sleep + release the lock (atomically)
- when awoken, re-acquire the lock before returning
- signal(cv)
- wakes a single waiting thread (if any)
- if no waiting thread, do nothing
CV needs lock to prevent race conditions around shared state
Rule of thumb 1 (经验法则)
Keep state in addition to CV(s).
CV’s are used to signal threads when state changes. If state is already as needed, thread doesn’t wait for a signal.
Example: unix pipes
finite-sized buffer
Writers add data to the buffer (need to wait if buffer is full)
Readers remove data from the buffer (need to wait if buffer is empty)
Rule of thumb 2
Always do wait/signal with lock held.
CV needs lock to prevent race conditions around shared state.
Rule of thumb 3
Whenever a lock is acquired, recheck assumptions about state!
Another thread could grab lock in between signal and wakeup from wait.
Rule of thumb 4
Have a separate CV for each condition
(Ensures waking up the right thread)
Lec 13. Semaphores
CV have no state (other than the waiting queue)
Semaphores have state: track integer value
Semaphore operations
- allocate and initialize
sem_init(...) { s->value = initval; }- User cannot R/W value directly
- Wait or Test:
sem_wait(sem_t *)- value–; waits if value is negative (<0)
- Signal or Post:
sem_post(sem_t *)- value++; wake a single waiter if exists
Value of semaphore:
- when >= 0: number of available slots
- when <0: number of waiting threads
Lec 14. Deadlock
Deadlock: no progress can be made because >=2 threads are waiting for the other to take some action and thus neither ever does.
Deadlock theory
Deadlocks can only happen with these 4 conditions
mutual exclusion
problem: threads claim exclusive control of resources that they acquire
solution: try to replace locks with atomic primitive 用原子操作代替锁
hold-and-wait
problem: threads hold resources allocated to them while waiting for additional resources
solution: acquire all locks atomically once (by using a meta lock)
1
2
3
4
5
6
7lock(&meta);
lock(&L1);
lock(&L2);
...
unlock(&meta);
// critical section code here
unlock(...);
no preemption
problem: resources (e.g. locks) cannot be forcibly removed from threads
strategy: if thread cannot get what it wants, release what it holds
1
2
3
4
5
6top:
lock(A);
if (trylock(B) fails) {
unlock(A);
goto top;
}disadvantages: livelock
circular wait
- problem: circular chain of threads such that each thread holds a resource (e.g. lock) being requested by next thread in the chain.
- strategy:
- decide which locks should be acquired before others
- if A before B, never acquire A if B is already held
- document this
Lec 15. IO
Canonical device
Interrupts vs Pooling
Fast device: better to spin
Floods of interrupts arrive can lead to livelock (CPU always handling interrupts)
Pooling has lower latency.
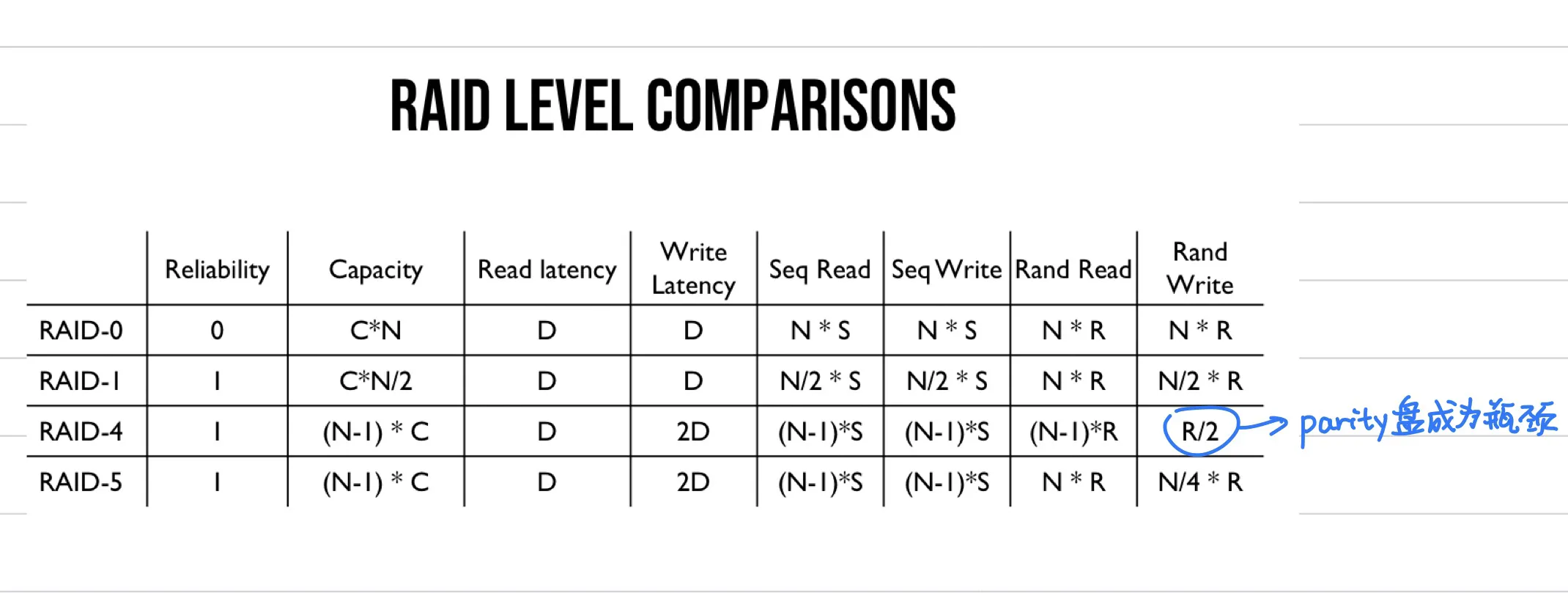
Lec 17. RAID & Files
Sometimes we want many disks: capacity. reliability, performance
RAID-0: striping 切片
Optimize for capacity.
No redundancy. Disk数量越多, 可靠性越低.
- capacity:
- no disks can we safely lose
- latency:
- sequential throughput:
- random throughput:
RAID-1: mirroring 镜像
- capacity:
- how many disks can fail: at least 1, at most
- latency: (write to both disks)
RAID-4: parity盘
- capacity:
- how many disks can fail:
- latency: , for random (read and write parity disk)
RAID-5: 轮流承担parity盘
- capacity:
- how many disks can fail:
- latency: , (read and write parity disk)
Lec 18. Files
File descriptor (FD)
int类型, points to inode- FD中存了offset
- 每个process有自己的fd table
- 用dup创建的新file descriptor会复制同样的offset
fsync(int fd)
- write buffering (file system keeps newly written data in memory for a while)
- fsync forces buffers to flush to disk from memory
Deleting files
- There is no syscall for deleting files
- Inode and associated file is garbage collected when no references (no directory pointing to the inode)
- Paths are deleted when
unlink()is called - FDs are deleted when
close()or process quits. - What will happen if file is opened (has fd) when unlink() is called? : File automatically deleted after fd closes
Rename
rename(char *old, char *new)- deletes an old link to a file, creates a new link to a file
- just changes filename, does not move data
Links
Hardlink
Hardlink: both path names use the same inode number (two links for the same file)
File does not disappear until all hard links removed
cannot hardlink directories
command:
ln <new filename> <current filename>
Softlink
- soft or symbolic links: point to second path name
- can softlink to directories
- command:
ln -s <oldfile> <softlink> - can point to anything, but the file you are pointing to may not exist
- confusing behavior: “file does not exist”
- confusing behavior: “cd linked_dir; cd …” in different parent
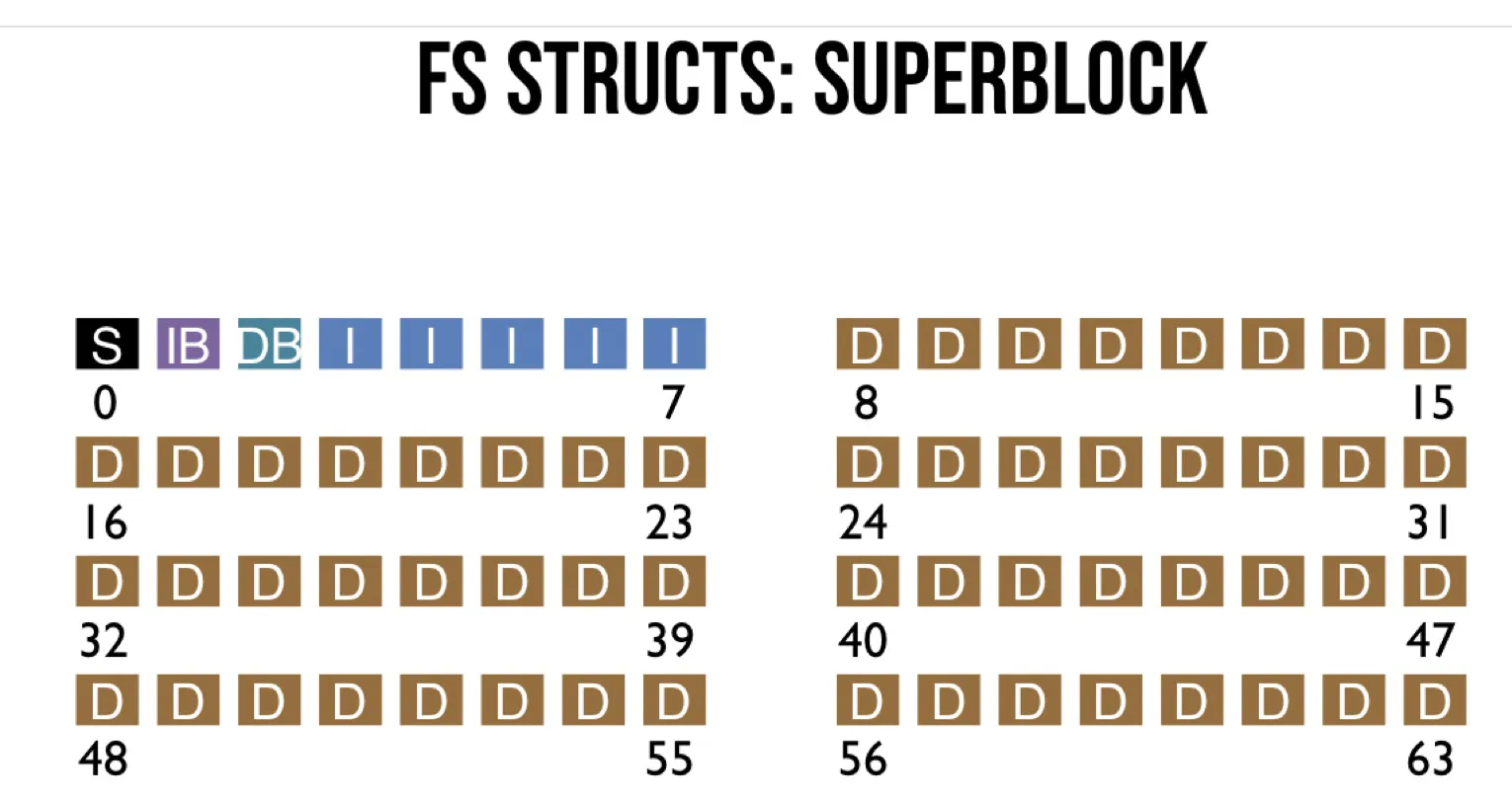
FS structs
Allocation strategies
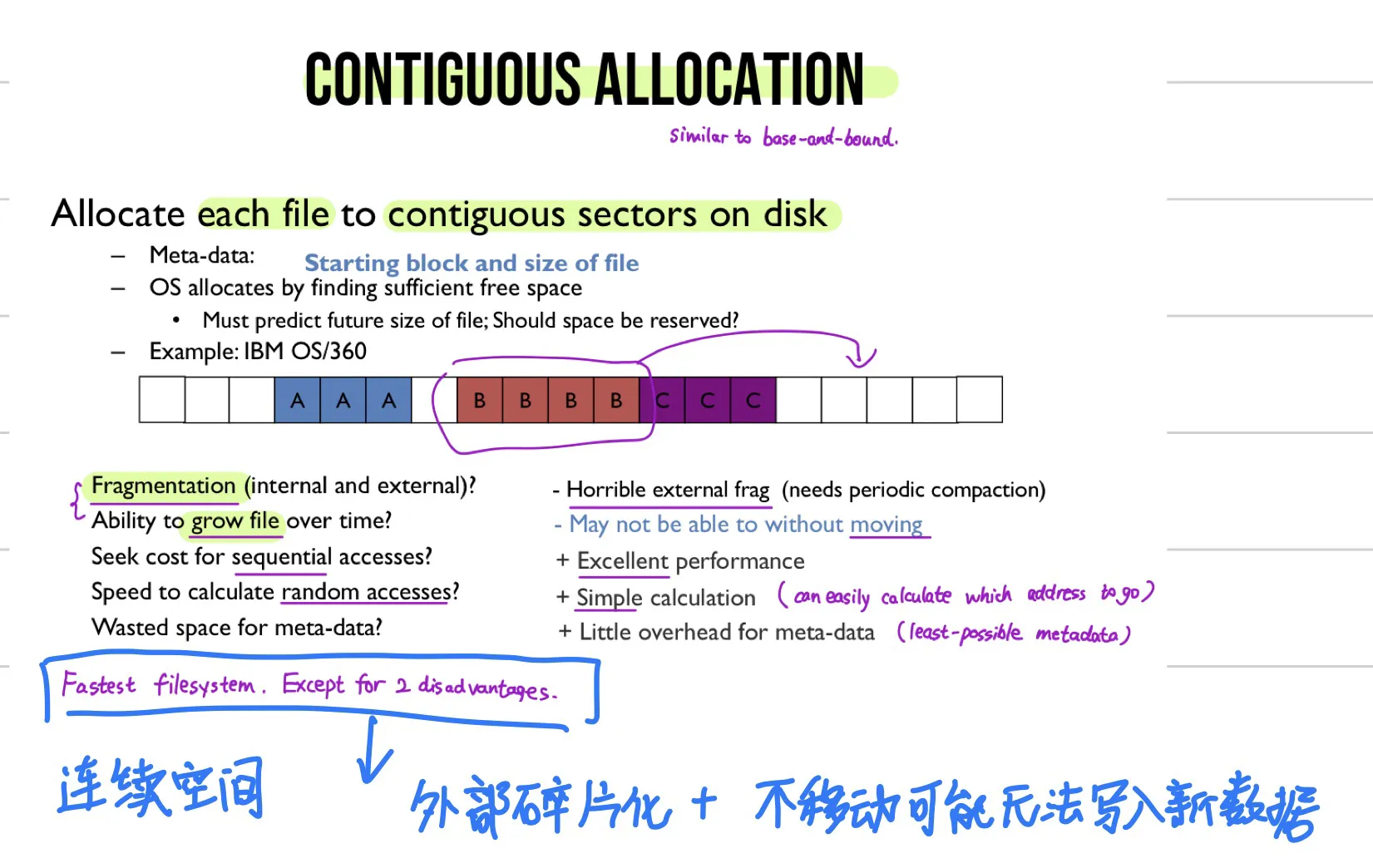
1. contiguous allocation
(similar to base-and-bound) Allocate each file to contiguous sectors on disk.
Fastest file system, but
- horrible external fragmentation, and
- may not be able to write new data without moving
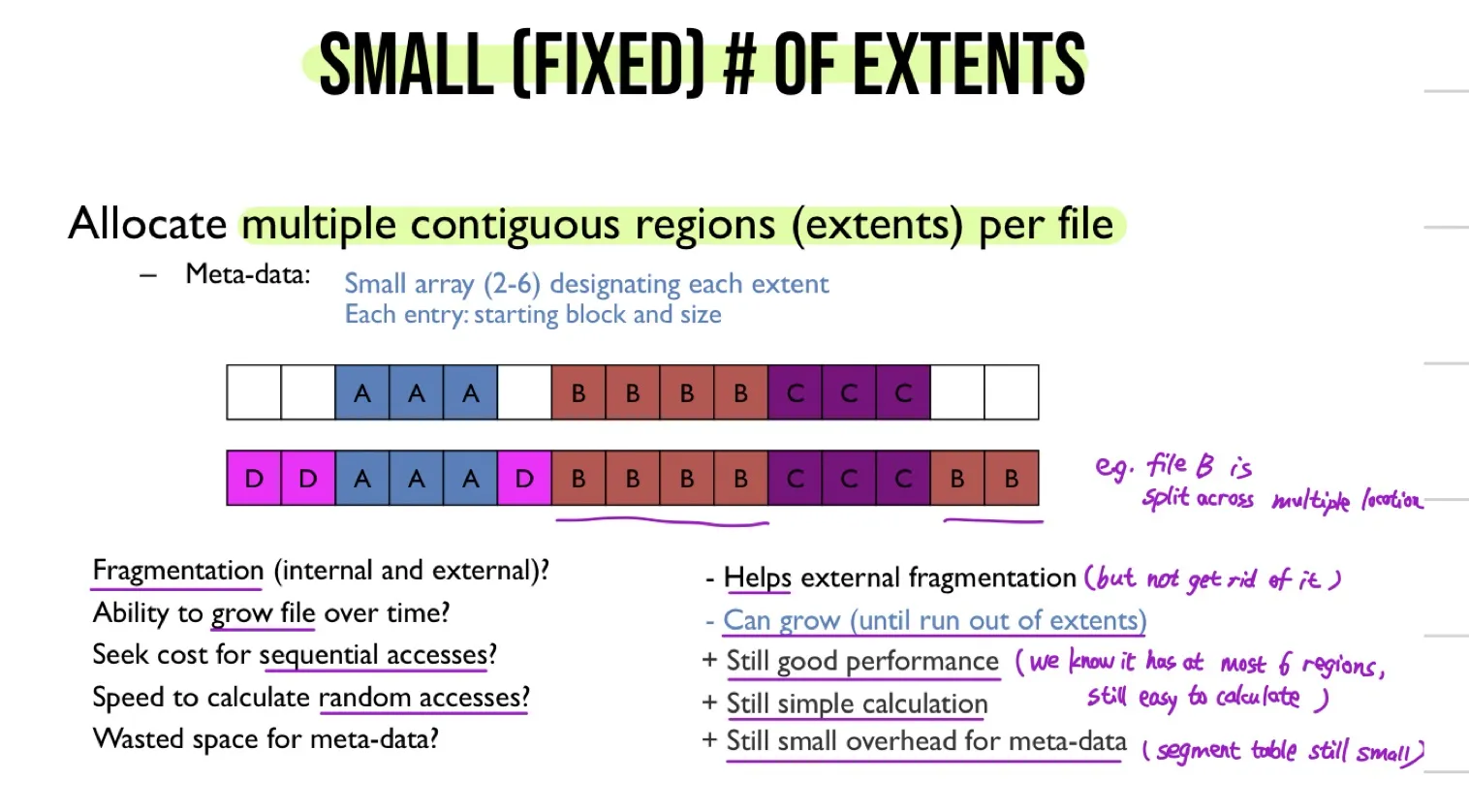
2. small (fixed) number of extents
Allocate multiple contiguous regions (extents) per file.
Still has external fragmentation.
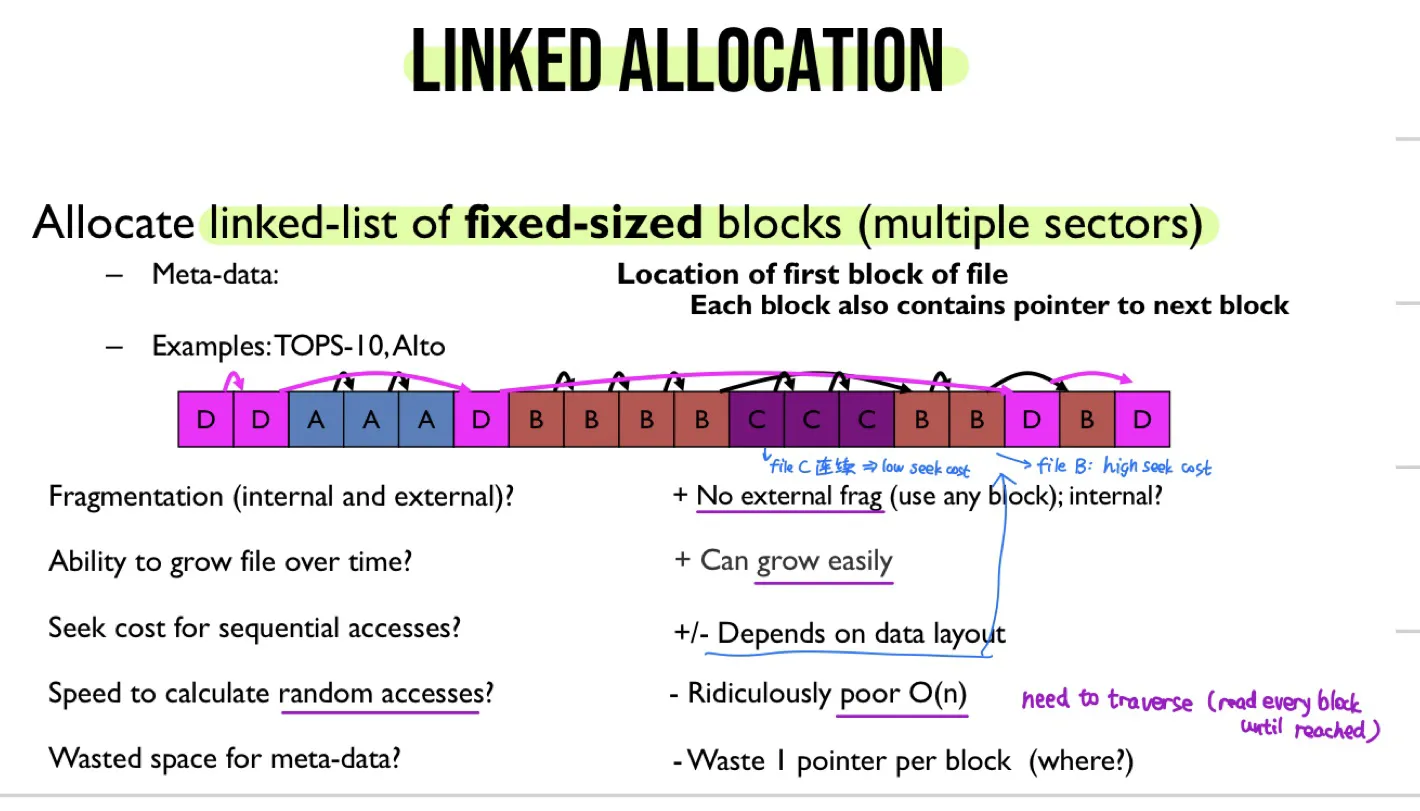
3. linked allocation
Allocate linked-list of fixed-sized blocks (multiple sectors)
- No external fragmentation
- Very poor random access
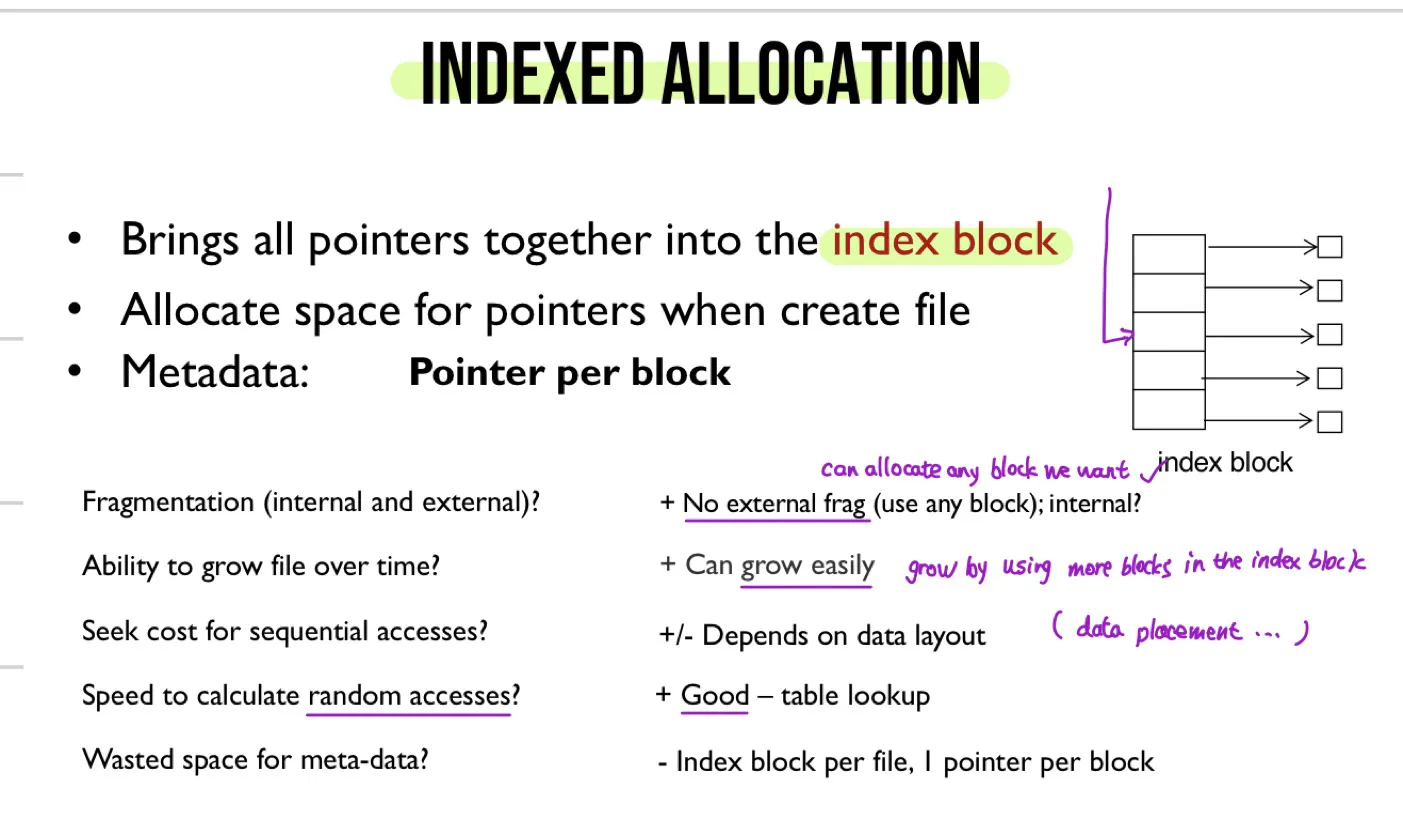
4. indexed allocation
put all pointers together into index block;
allocate space for pointers when creating files
- No external fragmentation
- good random access performance
5. multi-level indexing

Lec 21. FFS (Fast file system)
Disk-aware file system
Groups
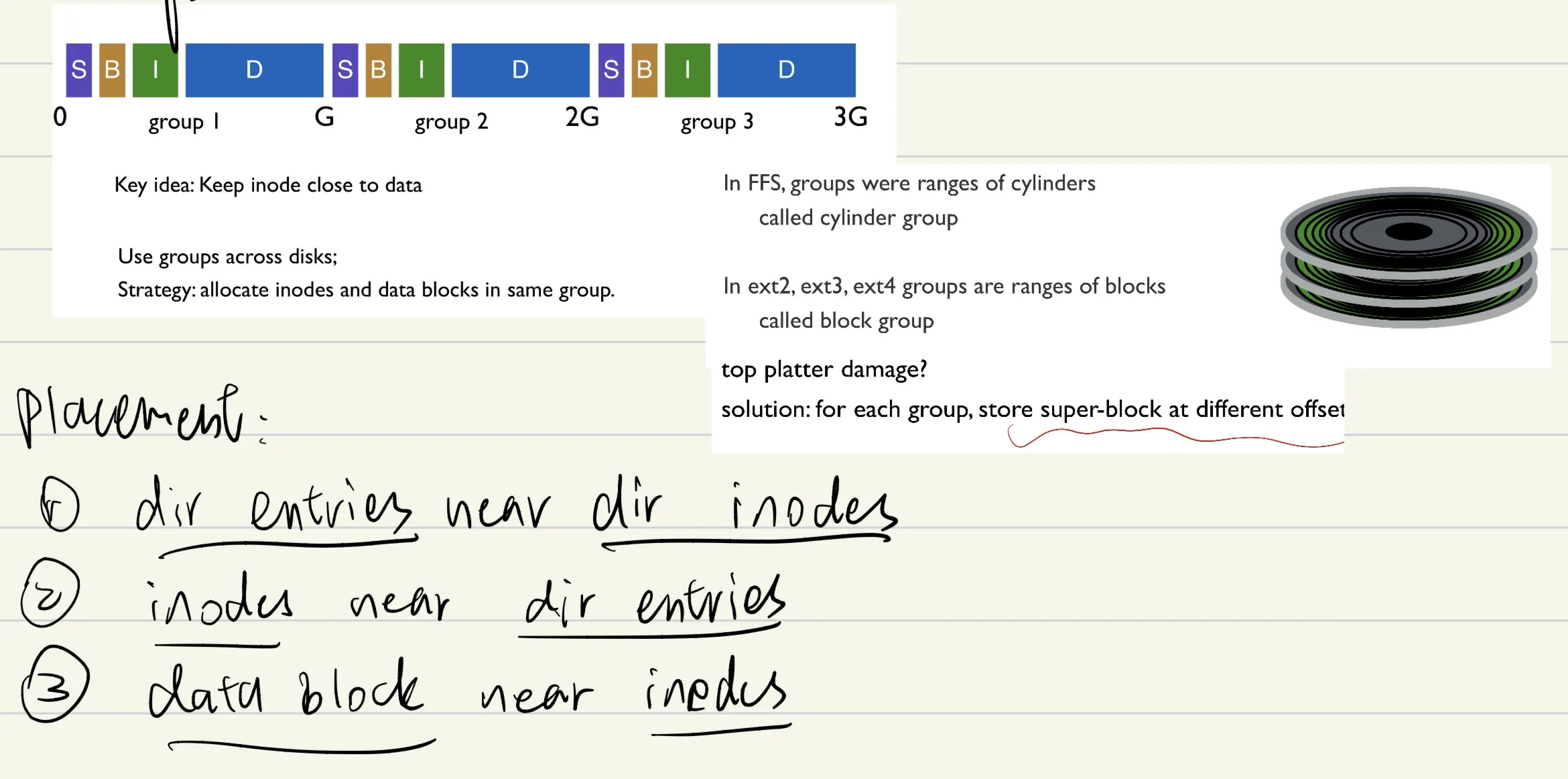
key idea: keep inode close to data
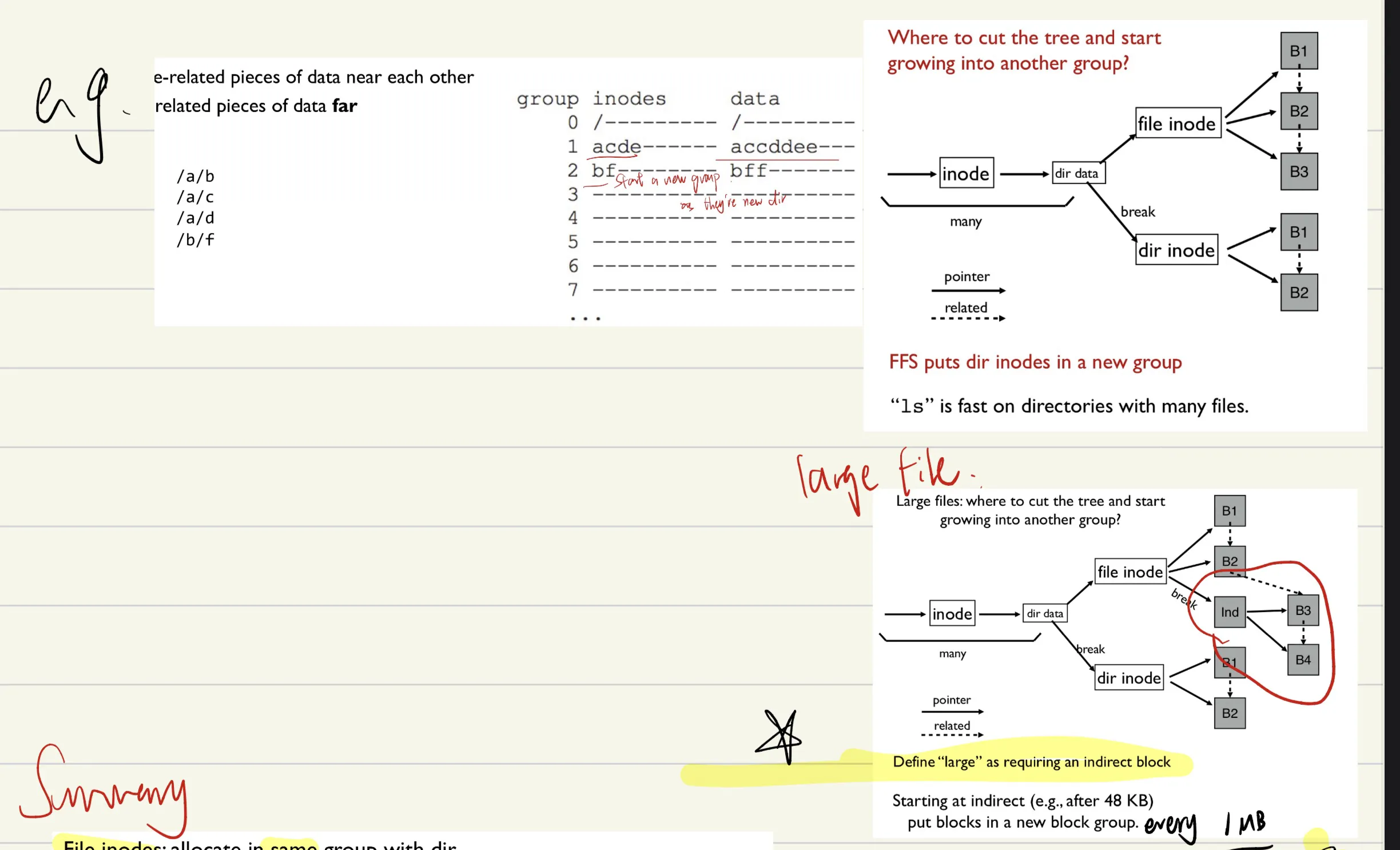
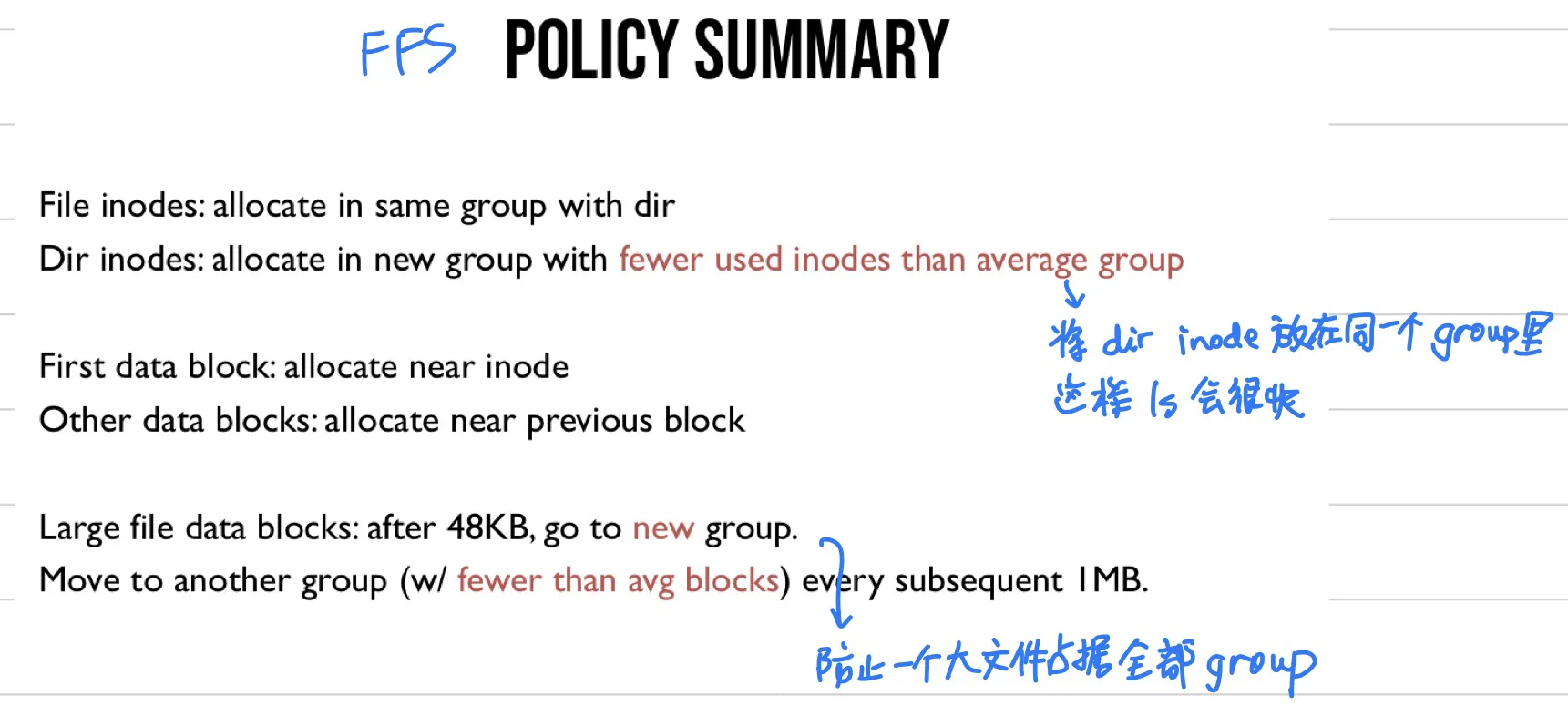
- FFS policy summary
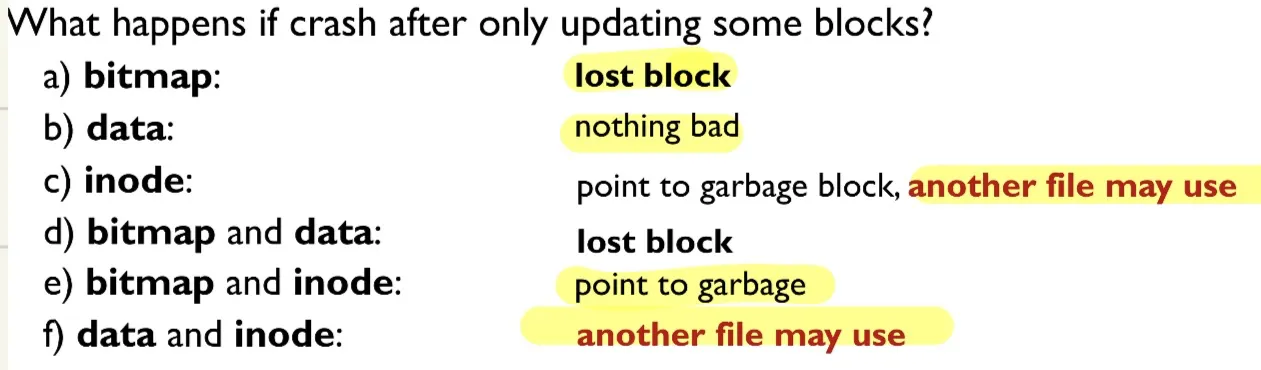
FS consistency
Problem: interrupt (power loss …) may leave data in inconsistent state
Solution
- FSCK
- After crash, scan whole disk for contradictions and “fix” if needed
- keep FS off-line until FSCK completes
- Problem:
- Not always obvious how to fix file system image
- Don’t know correct state, just consistent one (seemingly correct but may not be correct)
- Slow
- Journaling- get correct state
- TODO
Lec 23. SSD
Lec 24. Distributed Systems
Definition: more than 1 machine working together to solve a problem.
Challenges: partial failure; communication failure
UDP (User Datagram Protocol)
Minimal reliability
Message might be lost, reordered, duplicated.
The only protection is that data will not be corrupted.
Advantages: lightweight
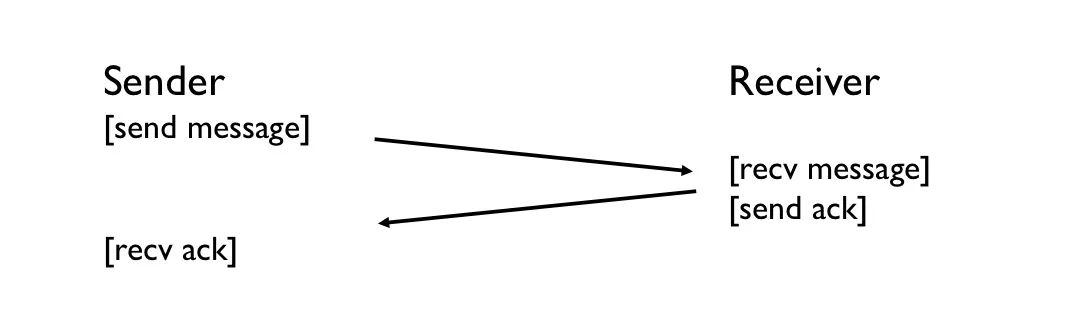
TCP (Transmission Control Protocol)
Reliable logical connections over unreliable physical connections.
Technique 1: ACK
Before sending data, establish connection
Technique 2: Timeout
For each missing ack, wait longer between retries.
Technique 3: receiver remembers messages
Solution: sequence numbers
- sender gives each message an increasing unique sequence number
- receiver suppress message if the message’s seq number < N or it is already buffered
- buffers messages to ensure messages are handled in order
RPC (Remote Procedure Call)
Approach: create wrappers so calling a function on another machine feels just like calling a local function.
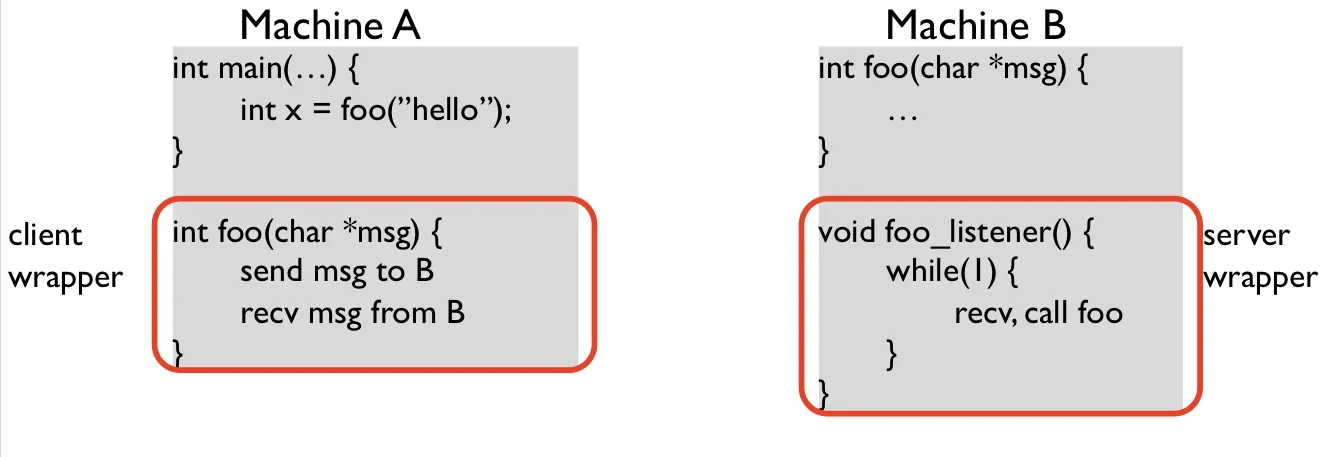
Wrapper generation:
- wrappers must do conversions: uniform endianness (little endian/big endian), pointers, …
- conversion is called marshaling/unmarshaling, or serializing/deserializing
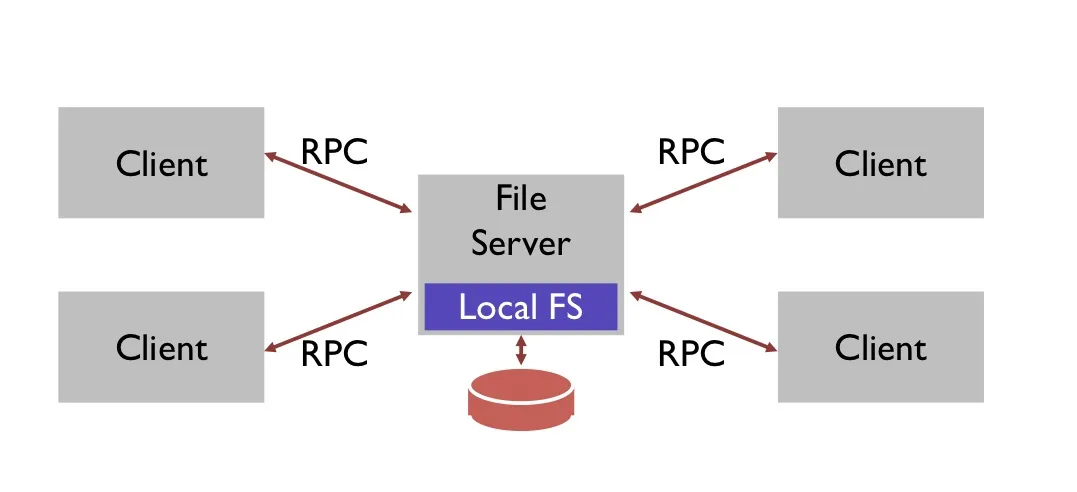
Distributed file systems
NFS (network file system)
Strategy 1:
open() on client calls open() on server, open() on server returns fd back to client;
read(fd) on client calls read(fd) on server, …
Problem: server crashs during several client read(fd) operations
Strategy 2: put all info in requests
Use stateless protocol: server maintains no state about clients
Need api change. One possibility:
pread(char *path, buf, size, offset)pwrite(char *path, buf, size, offset)
Advantage: server can crash and reboot transparently to clients.
Disadvantage: too many path lookups
Strategy 3: inode requests
inode = open(char *path)pread(inode, buf, size, offset)pwrite(inode, buf, size, offset)Good
Disadvantage: if file deleted, inode could be reused
Strategy 4: file handles
fh = open(char *path)File handle = <volume ID, inode number, generation number> (extended inode number)
Opaque to client (client cannot see the internals)
Idempotent operations: if f() is idempotent, then f() f() f() has the same effect as f()
e.g. pwrite(fh, buf, size, offset) is idempotent; append(fh, buf, size) is not idempotent
Strategy 5: client logic
write buffering