[Lecture Notes] CMU 15-618 Parallel Computer Architecture & Programming
Lec 2. A modern multi-core processor
4 key concepts: 两个与parallel execution有关, 两个与challenges of accessing memory 有关
Parallel execution
- Superscalar processor: Instruction level parallelism (ILP)
- ILP读未来的指令(每个周期读两条指令),有两个fetch/decode单元和两个exec单元,能够同时执行两条指令
- Multi-core: 多个processing cores
- 多核之前,处理器提升重点在更大缓存,更多分支预测predictor等;同时更多晶体管(才能放得下更多缓存和更多predictor和乱序执行逻辑)促生更小的晶体管,促进更高的计算机主频
- 2004年多核出现之后,人们在一个chip上放多个processor,用更多晶体管放更多核心。
- SIMD processing (aka Vector processing): 多个ALU(同一个core内)
- 仍然只需要一个fetch/decode单元,多个ALU。
- conditional execution: 如果想simd的程序块有if else,要通过mask处理
- 手写avx代码(cpu指令)是explicit SIMD; 而GPU是implicit SIMD,因为compiler生成的并不是并行指令(是普通的scalar instructions),只有GPU硬件运行才是SIMD的
Accessing memory
cache: reduce latency
prefetching reduces stalls: hides latency
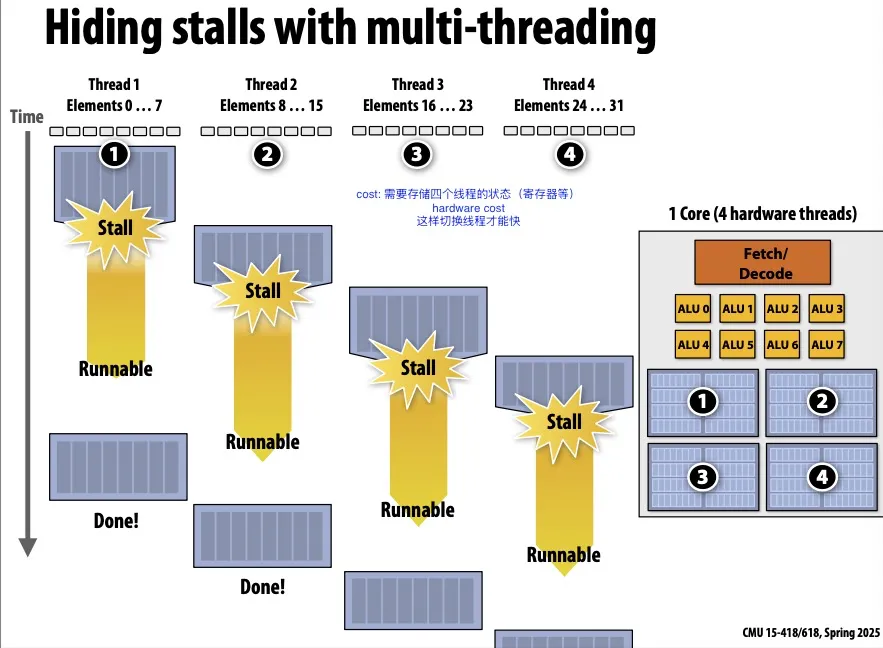
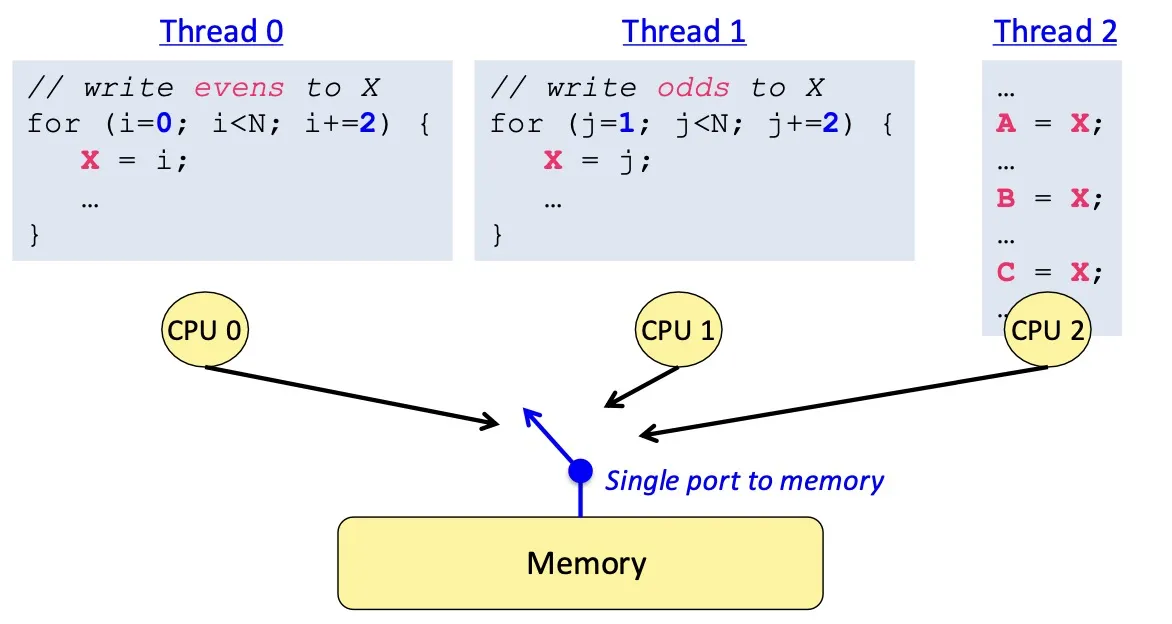
Multi-threading, interleave processing of multiple threads
- 跟prefetching一样,也是hide latency,不能reduce latency
- 指的是:开多个线程,在一个线程卡住的时候执行别的线程
- 在下图中,创建thread1的时候不仅仅创建thread1,还会告诉电脑创建了thread 2 3 4,硬件检测线程是否发生了stall(被等待内存操作卡住),如果发生了stall会很快切换到别的线程,想juggling一样。硬件决定如何juggle这些线程。
- 这样memory latency仍然存在,但是被hide了。memory latency在后台发生,前台CPU一直在执行有用的工作。
- 这种操作会导致单个线程的执行时间变长(因为thread1从runnable到重新开始执行有一段空挡(这段空隙在执行thread 2 3 4)。
- 需要更多硬件资源,存储线程的register等状态信息,这样切换线程才会快。且需要较大的memory bandwidth。
GPU设计成处理大量数据(远大于核内缓存的数据量)。
与CPU内存相比,GPU显存带宽更高,但延迟更高。
关于NV GPU架构的一些备注
一个GPU有多个SM;每个SM上有一块shared memory;同时每个线程有自己的registers和local memory,但如果线程registers超出,则会溢出到global memory。
因为一个block保证在一个SM上,所以threads within a block可以访问__shared__ memory。
Warp是硬件规定好的,通常为32-threads,warp内一定所有线程在任意时刻都做同一件事情(如果遇到branch divergence,则会被mask out,但warp仍然同一时刻执行同一个branch)
假设block size是256(程序员指定的),warp为32(硬件规定),那么threads in the same block可能在不同的warp里,threads within a block可能同一时刻在执行不同的指令,因为它们在不同的warp调度不同。
Lec 3. Progpramming Models
Abstraction vs Implementation
abstraction和implementation不是一个东西!
ISPC (Intel SPMD Program Compiler)
SPMD: single program multiple data
一个ISPC计算sin(x)的例子
Interleaved
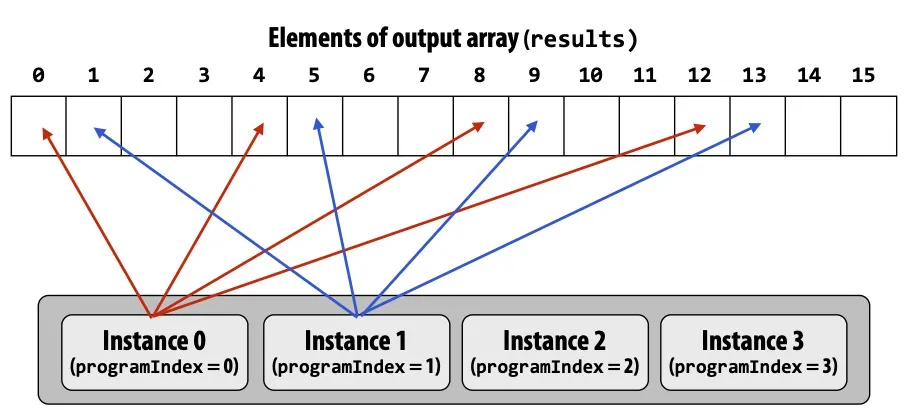
export void sinx( uniform int N, uniform int terms, uniform float* x, uniform float* result) { // assume N % programCount = 0 for (uniform int i=0; i<N; i+=programCount) { int idx = i + programIndex; // 不重要 } } <!--code0-->
在这个示例中blocked比interleaved更好。
因为每个iteration工作量完全相同,SIMD指令load连续内存(直接_mm_load_ps1)比load不连续内存(这种操作叫gather,只在AVX2及以后才支持)更快。
我们可以使用foreach来代替。
foreach表示循环中的每一次iteration都是独立的,由ISPC决定如何分配
1 | |
- ISPC: abstraction VS. Implementation
- Programming model: SPMD
- 程序员想的是,我们有programCount个逻辑指令流,写代码也按照这样的abstration去写
- Implementation: SIMD
- ISPC输出SSE4或AVX这种指令来实现逻辑操作
- Programming model: SPMD
Four Models of Communication
Shared Address Space model
共享内存,不同线程通过读写同一块内存来通信
很多人认为这是最方便易用的model,因为这和sequential programming最相近
每个处理器都能访问任意内存地址
Uniform memory access time; Symmetric shared-memory multi-processor (SMP), : 指每个处理器都能访问内存且访问内存所需时间一致。Scalability不好。
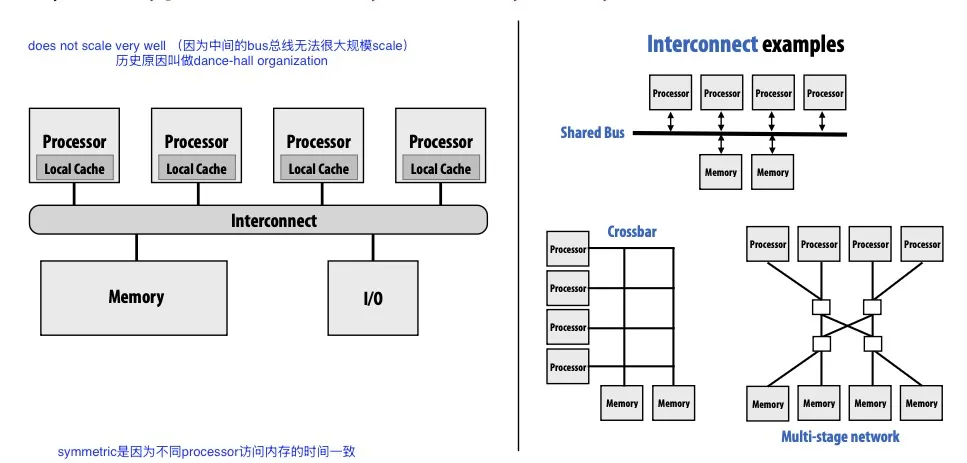
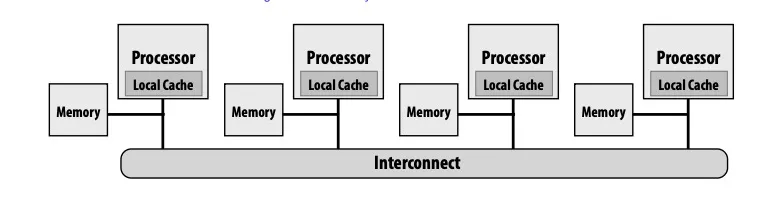
Non-uniform memory access (NUMA): 每个处理器都能访问完整内存,但所需时间不一致。这样Scalability比较好。但是performance tuning可能需要更多精力。
Message Passing model
- 线程之间不共享内存(address space不共享),只能通过发送和接收messages通信
- 相比shared memory的优点:不需要别的硬件,可以纯软件做,实现起来简单。常用的库是MPI (message passing interface)
- 现代很常用的操作是,在一个节点(节点内是多核的)内用shared address,在不同节点间用message passing
这里很搞:abstraction can target different types of machines.
分清abstraction和implementation的区别!
比如说:
message passing 这个 abstraction 可以使用硬件上的 shared address space 来 implement。
- 发送/接收消息就是读写message library的buffer。
shared address space 这个 abstraction 在不支持硬件 shared address space 的机器上也可以用软件来 implement (但是低效)
- 所有涉及共享变量的page都标记成invalid,然后使用page-fault handler来处理网络请求
The data-parallel model
- 上面的shared address space和message passing更general
- data-parallel更specialized, rigid。
- 在不同的数据(数据块)上执行相同的操作。
- 通常用SPMD的形式:map (function, collection),其中对所有的数据都做function的操作,function可以是很长的一段逻辑,比如一个loop body。collection是一组数据,可以包含多个数据。
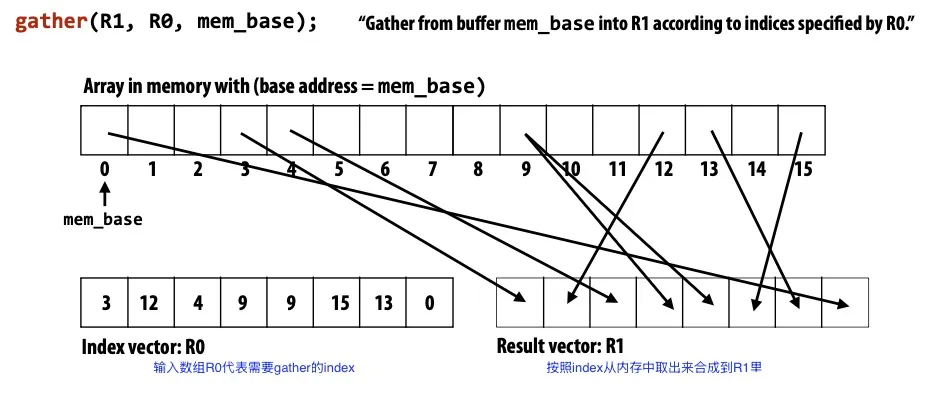
- gather/scatter: gather是把本来不连续的数据按照index放到一起,scatter是把本来连续的数据分散开。
The systolic arrays model
读内存太慢了,memory bandwidth会成为瓶颈
所以要避免不必要的内存读取,尽量只读一次内存,做完所有需要用到这块内存的操作,再写回去。
概括four models of communication
- shared address space: 共享内存通信
- message passing: 发消息通信
- data parallel: 对一大块数据分块执行相同操作
- systolic arrays: 减少内存读取
Lec 5. Parallel Programming Basics
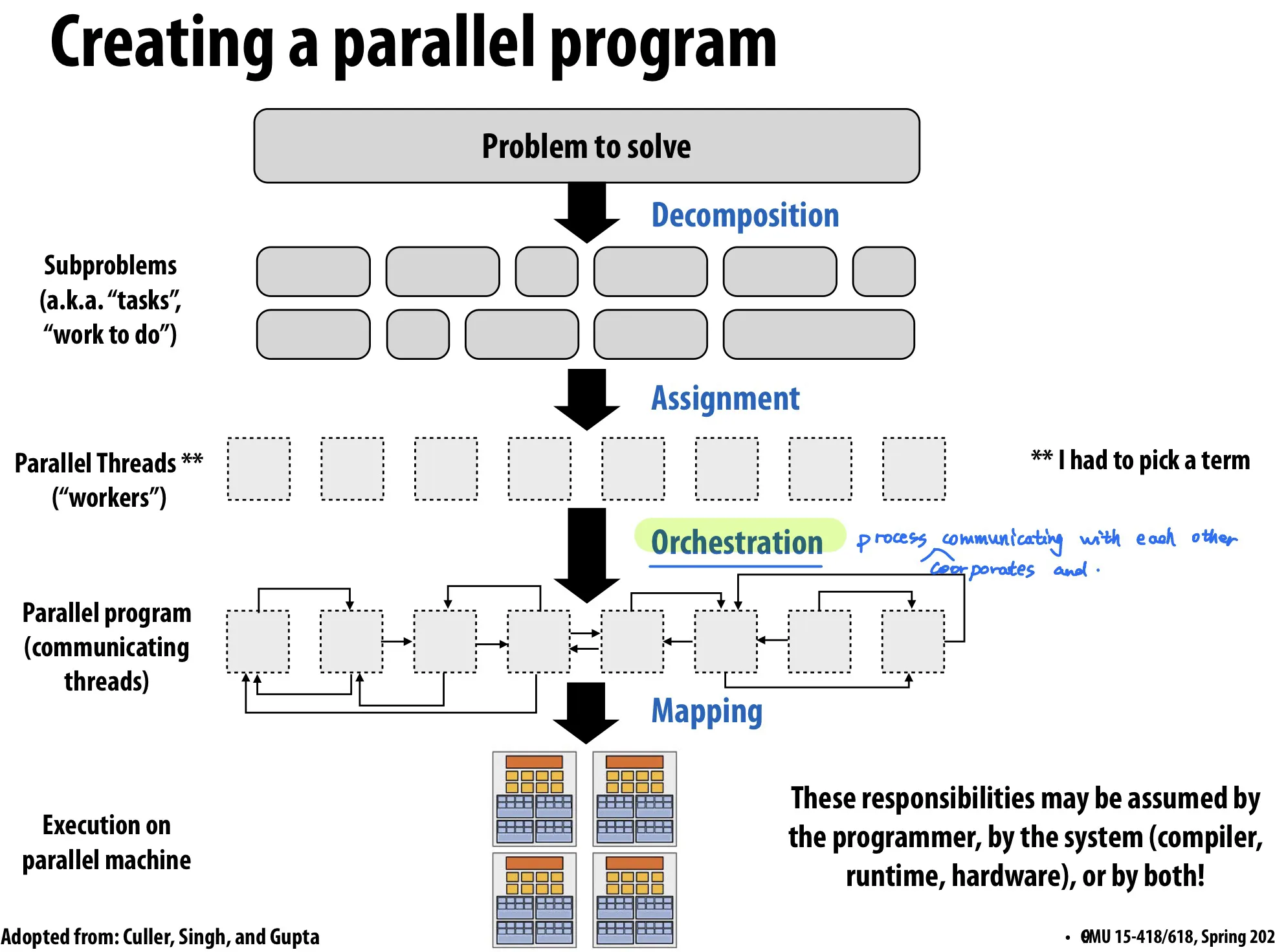
Decomposition
把问题分解成 tasks
Main idea: 创造至少能把机器占满的tasks数量,通常对于t个processor会给多于t个task,并且要让这些task尽可能 independent.
Amdahl’s Law: 程序中有S部分只能顺序运行(无法用并行加速)则整个程序的speedup 1/S.
通常是programmer负责decomposition。
Assignment
Goal: balance workload, reduce communication costs
can be performed statically or dynamically
- statically: e.g. ISPC
foreach - dynamically: e.g. ISPC
launch tasks运行的时候会维护线程池,线程池中的线程从任务队列中读。这样做的优点是runtime workload balance.
- statically: e.g. ISPC
Orchestration
Goal: reduce communication/sync cost, preserve locality of data reference, reduce overhead
需要考虑机器的特性(上面的decomposition和assignment不用太考虑)。
包括
- structuring communication: 信息传递模型 e.g. 传一个chunk数据而不是只传一个byte,节约overhead
- adding synchronization to preserve dependencies
- organizing data structures in memory
- scheduling tasks
Mapping to hardware
对程序员来说是optional的。programmer可以显式制定哪个thread跑在哪个processor上。
- mapping by OS: e.g. pthread
- mapping by compiler: e.g. ISPC maps ISPC program instances to vector instruction lanes
- mapping by hardware e.g. GPU map CUDA threads to GPU cores
Mapping 还能有不同的decisions,比如说
- Place related threads on the same processor: 最大化locality,共享数据,减少通讯成本
- Place unrelated threads on the same processor: 可能一个thread受制于内存带宽,另一个受制于计算时间,这两个thread放在一起可以让处理器利用率更高
A parallel programming example: 2D-grid based solver
TODO here.
Lec 6. Work Distribution & Scheduling
key goals:
- balance workload
- reduce communication
- reduce extra work (overhead)
workload balance
Static assignment
任务分配在运行之前就已经 pre-determined
例如之前讲的blocked assignment和interleaved assignment.
Zero runtime overhead
当任务量可预测时可以使用。不一定要任务量相同,可预测不会变就行。
Semi-static assignment
可预测未来短期内的任务量
一边运行一边profile并调整任务分配(periodically profiles itself and re-adjusts assignment)
Dynamic assignment
任务量unpredictable.
while (1) { int i; lock(counter_lock); i = counter++; unlock(counter_lock); // 或使用 atomic_incr(counter); 代替 if (i >= N) break; // do with index i } <!--code2-->
Scheuling fork-join programs
Bad idea:
cilk_spawn-->pthread_create,cilk_sync-->pthread_join因为创建kernel thread开销很大。
应该用线程池。
让idle thread 从别家thread的queue里steal work to do.
continuation first:
- record child for later execution
- child is made available for stealing by other threads (child stealing)
- 在遇到spawn的时候,自己执行spawn后面的任务,并把spawn出来的放在自己的work queue里,等待别的线程(如果别的线程有空闲)steal自己的任务。
- 如果没有stealing,那么(相比于去除所有spawn语句)执行顺序全都是反的
child first:
- record continuation for later execution
- continuation is made available for stealing by other threads (continuation stealing)
- 遇到spawn的时候,只创建一个可被steal的项目。
work queue可以用dequeue (double-ended queue)实现
每一个线程有自己的work queue,针对自己的work queue,在尾部添加,从尾部取出
如果要steal别的线程的work queue,从头部取出
Lec 7. Locality, Communication, and Contention
Lec6讲如何平均分配任务,Lec7讲如何降低communication开销.
synchronous (blocking) send and receive
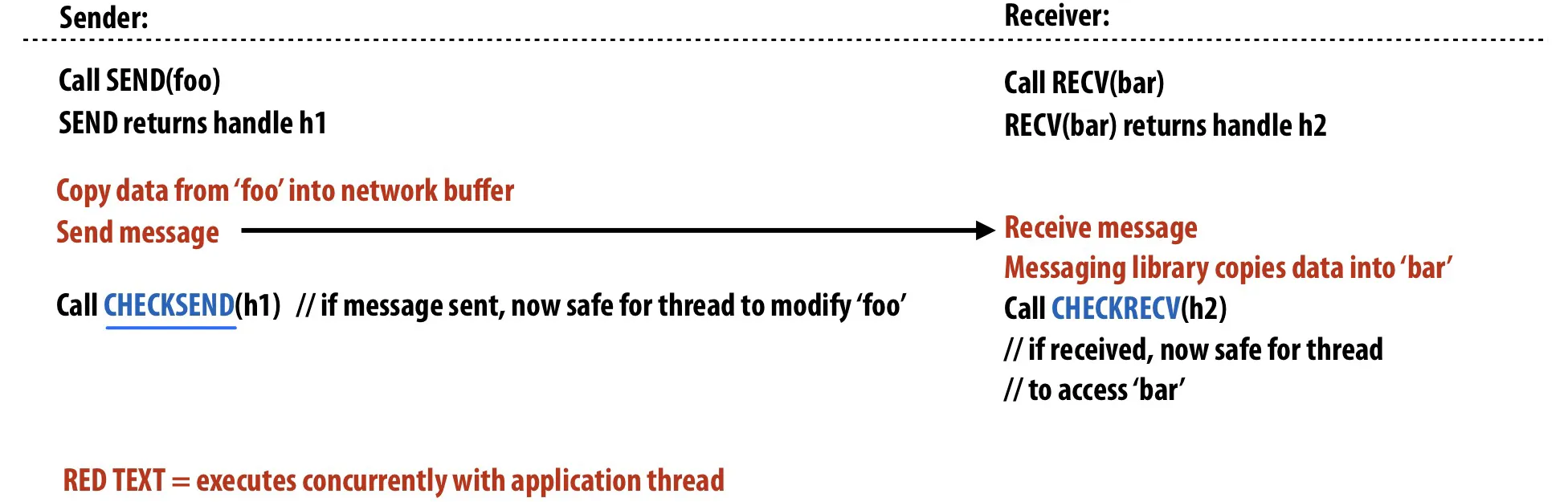
non-blocking asynchronous send and receive
send()和recv()函数会立即返回 在后台做事
Pipeline
使用Pipeline: Latency 不变, Throughput 增加
例子:
Communication = Overhead(橙色) + Occupancy (蓝色) + Network delay (灰色)
最长的部分是瓶颈,决定了throughput上限
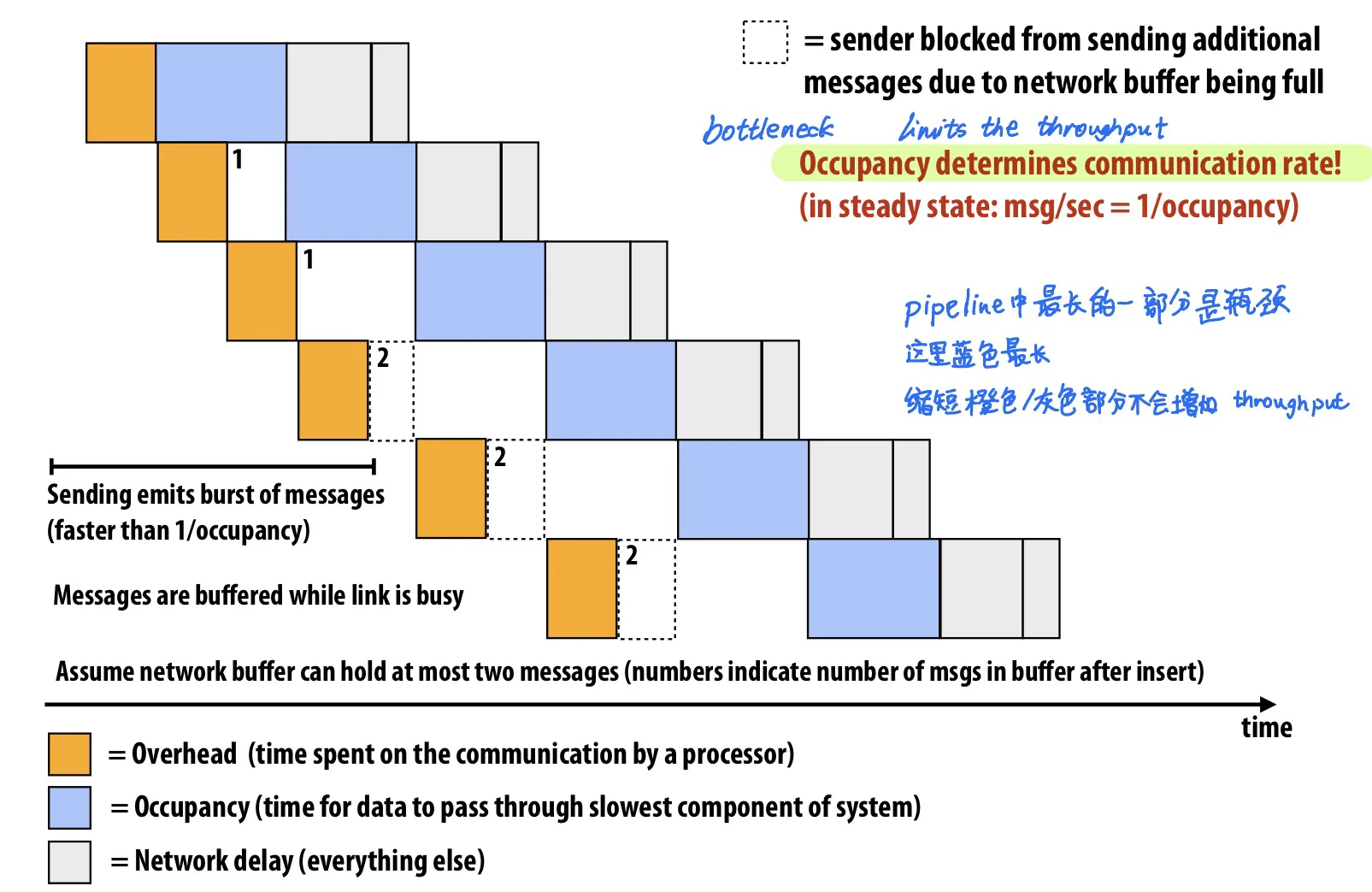
Overlap: communication和其它工作同时运行的时间。
我们希望能尽可能增加overlap这样communication cost才会降低。
降低overlap的方法
- Example 1: Asynchronous message send/recv 异步消息
- Example 2: Pipelining 发送多条消息时让这个发送过程overlap
Communication
Communication包含inherent和artifactual
Inherent communication: 程序算法写好的,必须发生的通信
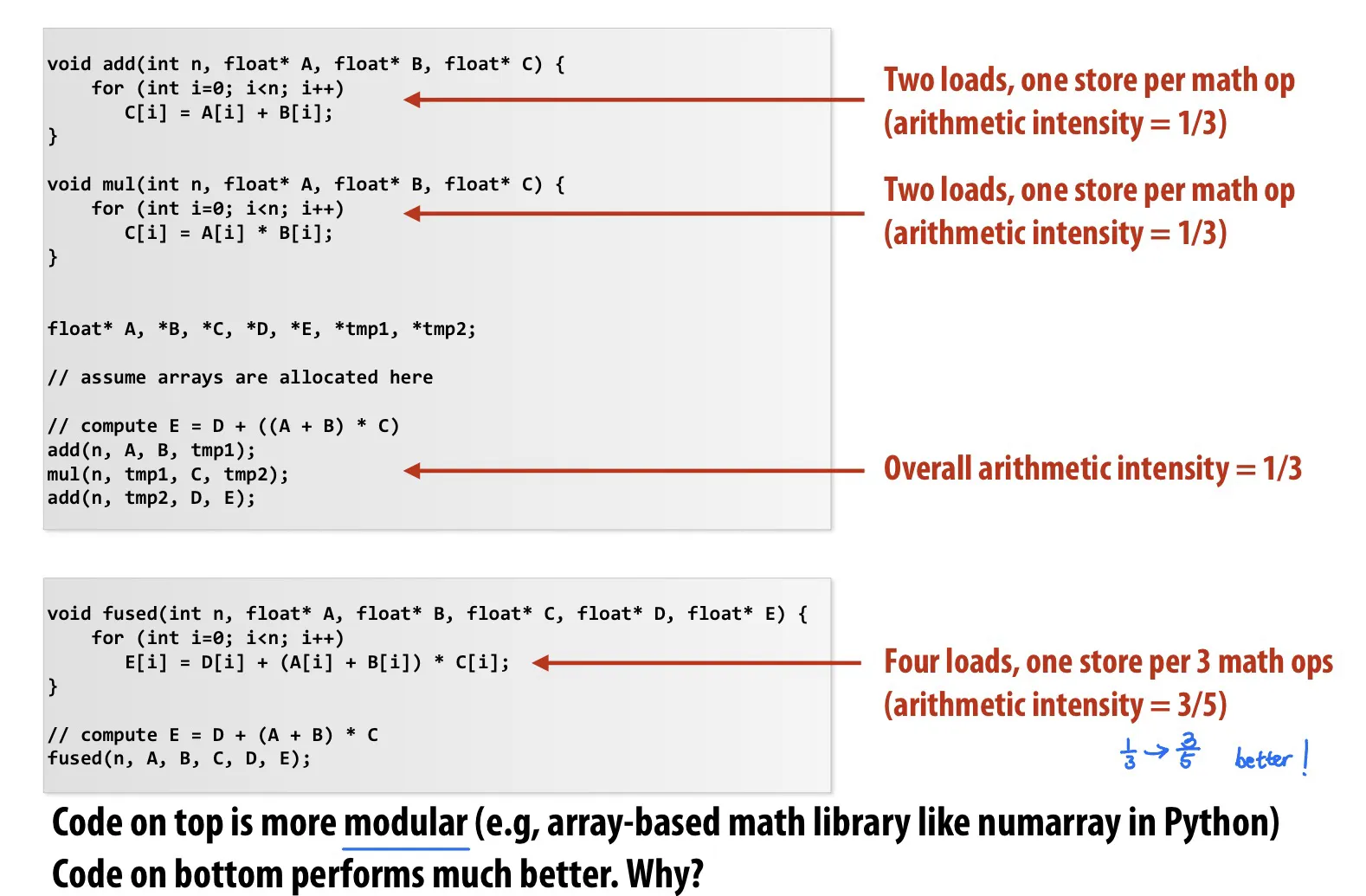
- Communication-to-computation ratio: 通信量/计算量 的比值。越低越好。
- arithmetic intensity: 1/communication-to-computation ratio. 越高越好。
Artifactual communication: 所有别的通信,因为memory hierarchy导致额外的通信,例如L1/L2/L3/内存/网络之间的通信。包括:
① 系统有minimum granularity of transfer: 即使只需要读取4byte数据,也需要复制64-byte整条cache line
② 系统有rules of operation: 例如,写入内存需要先把内存读到cache line中(write-allocate)之后踢出cache line再写入内存,导致一次写入操作需要访问两次内存
③ Poor placement of data in distributed memories: 被某个processor访问最多的数据并没有放在这个processor附近
④ Finite replication capacity: 因为cache太小放不下,会被踢掉,所以有一些数据频繁被踢出/放入cache
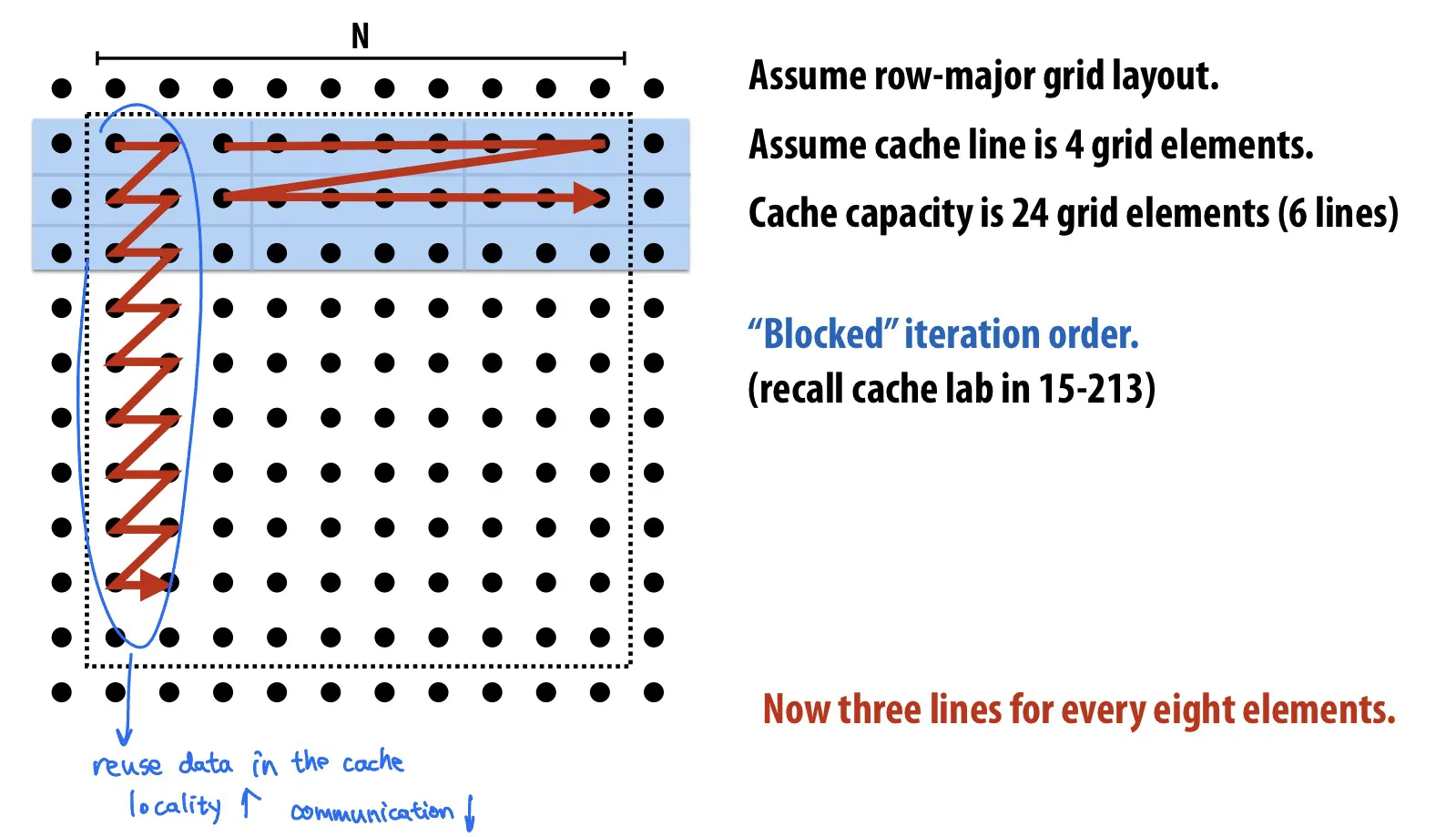
提高locality对降低artifactual communication很重要
提高temporal locality的例子
by changing grid traversal order
by fusing loops
by sharing data
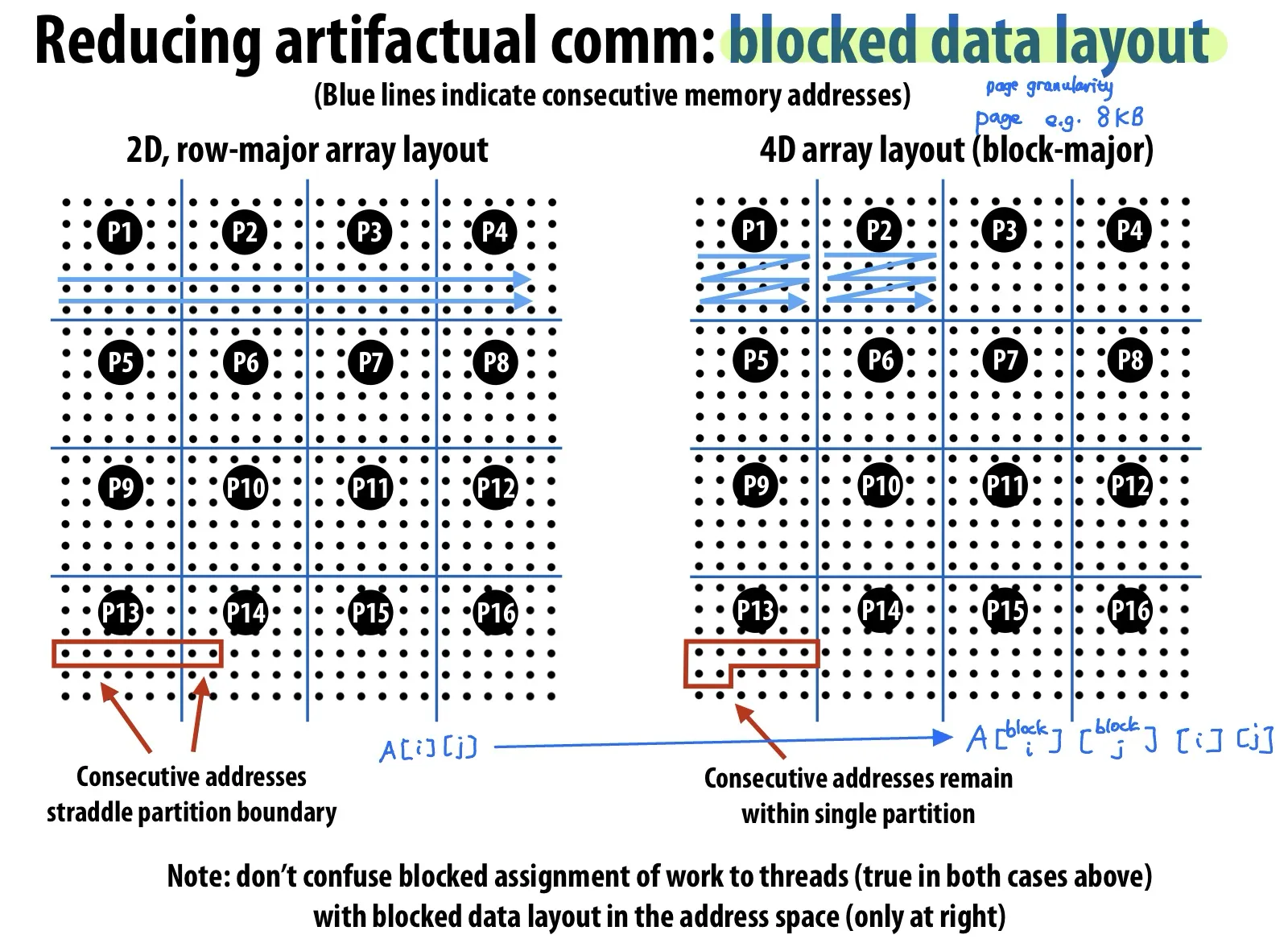
提高spatial locality
false sharing 不好
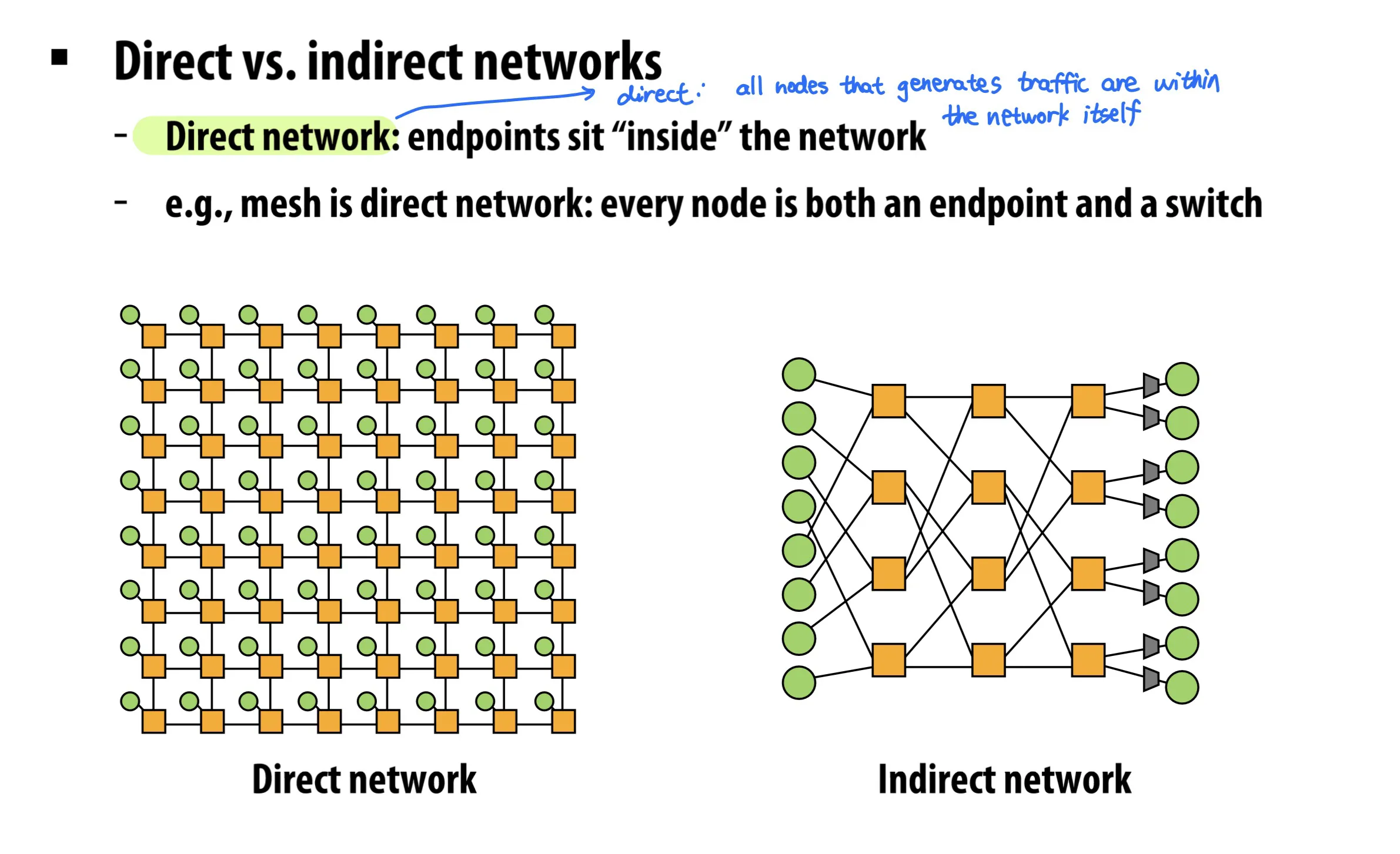
4D array layout (blocked data layout): Embedding a 2D array within another 2D array allows page granularities to remain within a tile, making it practical to map data to local portions of physical memory (thereby reducing cache miss latencies to main memory).
Contention
Contention: 在短时间内很多人请求同一个resource
Example: distributed work queues (让每个线程有自己的work queue)可以降低contention
Summary
- 降低communication costs
- Reduce overhead: 发更少的消息数量,更长的消息内容(合并短消息)
- Reduce delay:提高locality
- Reduce contention: 把contended resource分开,例如local copies, fine-grained locks
- Increase overlap: 用异步消息、pipeline等 提高communication和computation的overlap
Lecture 9. Workload-Driven Perf Evaluation
- Super-linear Speedup:
- processor足够多的时候,每个processor分到的数据fits in cache
- Decreasing Speedup:
- 随着processor增多,communication占比太大了
- Low speedup:
- Increasing contexts are hyperthreaded contexts (?)
Resource-oriented scaling properties
- Problem constrained scaling (PC)
- 更快速解决同一个问题
- Memory constrained scaling (MC)
- 不爆内存的情况下运行最大能完成的任务
- Time constrained scaling (TC)
- 同样的时间内完成更多任务
Simulation
Execution-driven simulator
- 模拟内存,模拟内存访问
- 模拟器的performance通常与模拟的细节数量成反比
Trace-driven simulator
- 在real machine上运行real code得到内存访问的trace,或者用execution-driven simulator生成trace
- 然后在模拟器上运行trace
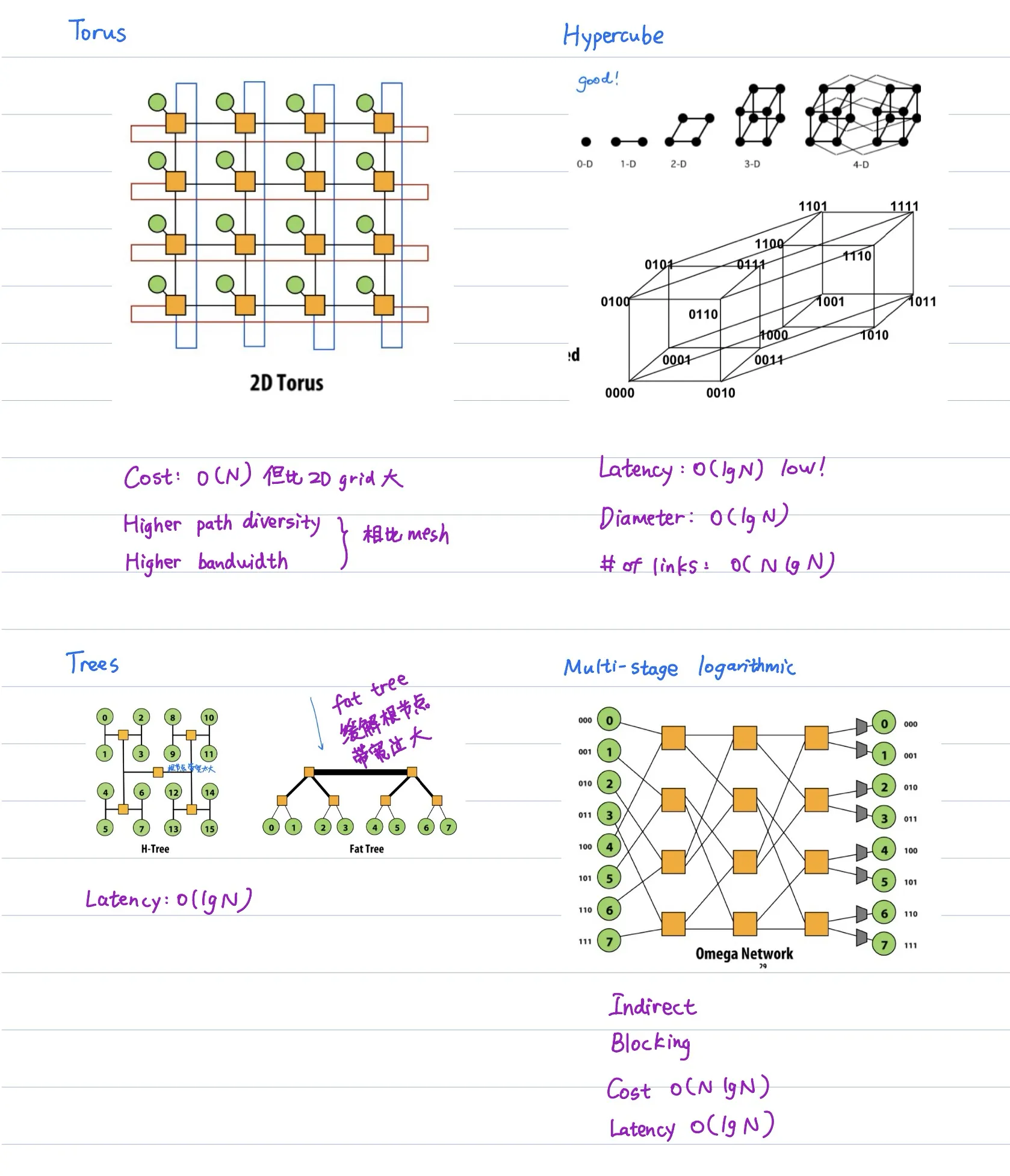
Lec 10. Interconnects
Interconnect terminology
Terminology
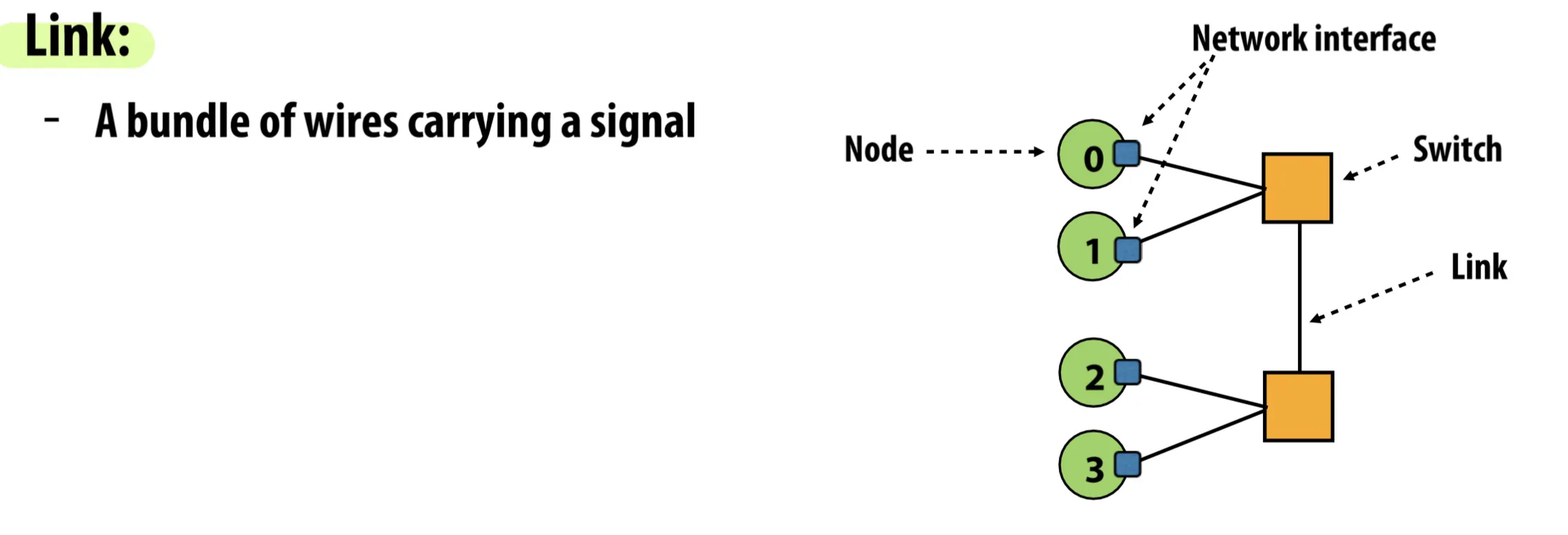
Network node: 网络终端,会产生或消耗traffic,例如processor cache
Network interface: 把nodes和network相连
Switch/Router: 将固定数量的input links与固定数量的output links相连
Link: 传输信号的线缆
设计interconnection需要考虑的因素
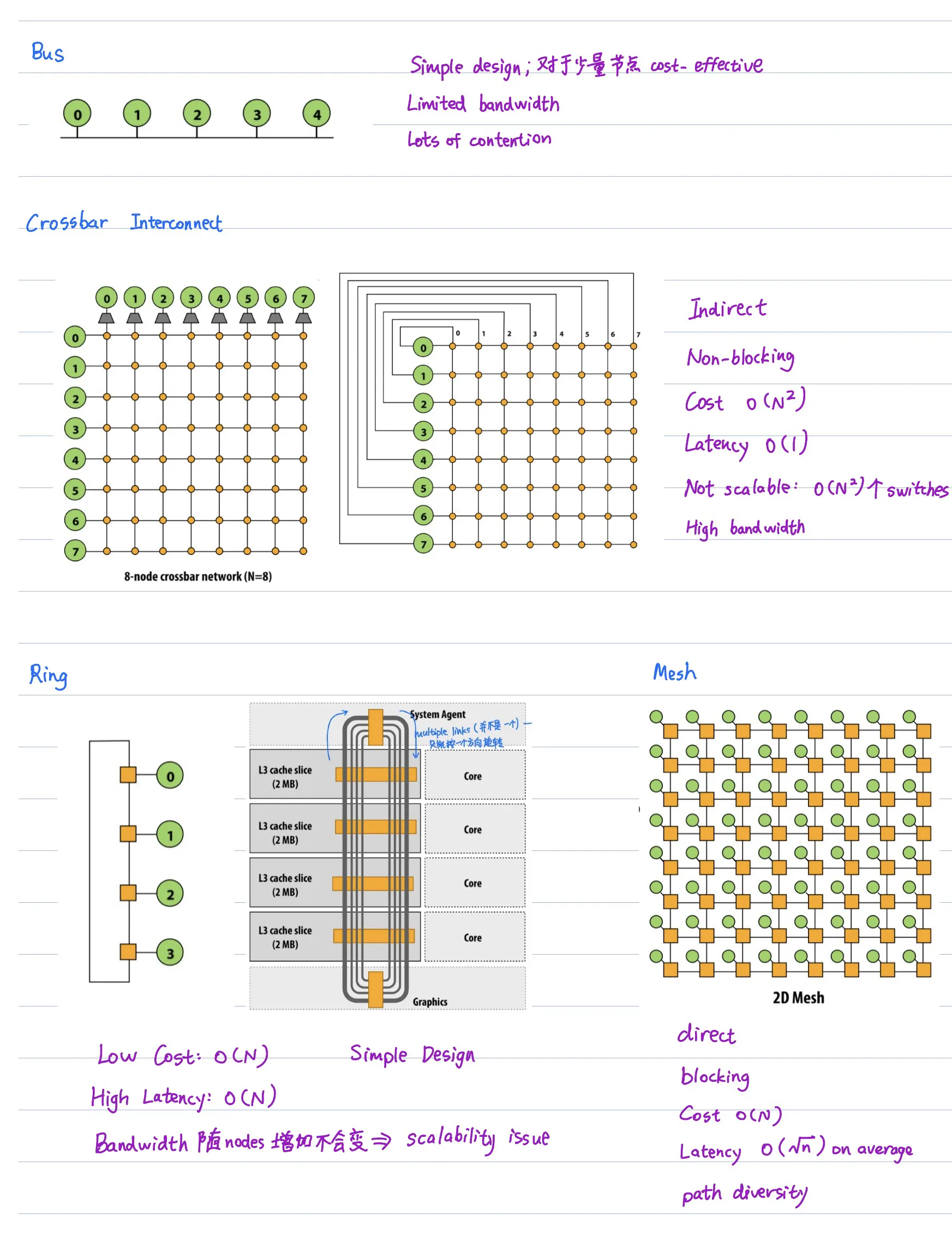
topology: 怎么相连
topology的属性:
routing distance: nodes之间的长度,nodes相连需要多少个links (hops)
diameter: 最大routing distance
average distance: 平均routing distance
direct / indirect networks
bisection bandwidth
blocking vs non-blocking: 如果任何两个pairs of nodes可以同时传输,不相干扰,则为non-blocking。大部分network都是blocking的
routing: 消息沿什么路线传输到达目的地?可以static可以adaptive
buffering and flow control
Buffering and Flow control
和14740的第一节课讲的很像
Lec 11. Perf Tools
性能测试工具
GProf
- compiler flag
-pg - places a call into every function --> call graph (total time in each function)
- 先跑程序,然后单独使用
gprof命令(不传参数)
Perf
- 有硬件指令测量性能计数器:cache misses, branch mispredicts, IPC, …
perf stat(同时只能开启4个counter)
VTune
- similar to perf: analysis across counters
- 有图形界面和解析
Debug工具
Valgrind
- heavy-weight, 需要 shadowing
- 有大量的overhead,不要用它测试performance
valgrind --tool=memcheck
Address Sanitizer
- GCC and LLVM support, 有编译器支持
- overhead比valgrind小一些
-fsanitize=address
Advanced analysis
Pin (Pintool)
- acts as a virtual machine: reassembles instructions
- can record every single instruction/block(无跳转)/trace(可能跨函数)
Contech
- compiler-based (uses clang+LLVM)
- record control flow, mem access, concurrency
- traces analyzed AFTER collection
Summary questions
- Reproducible?
- Do you have a workload? Is the system stable? (Stable是说每次运行性能差距不能太大)
- Workload at full CPU?
- Other users using CPU? Does workload rely heavily on IO?
- 使用
time/top看cpu占用时长
- Is CPU time confined to a small number of functions?
- 占用时长最长的函数?算法复杂度?
gprof/perf
- Is there a small quantity of hot functions?
perf/VTune
Lec 12. Snooping-based Cache Coherence
Recap:
- write-allocate: 如果写入的内存不在cache中,则需要先把memory读到cache中再写入cache
- write-allocate与write-through和write-back都可以配合使用,但通常write-allocate与write-back搭配
- no-write-allocate: 直接写内存
- write-through: 同时写入cache和memory
- write-back: 只写入cache,之后再flush to memory
Memory coherence
A memory system is coherent if:
the results of a parallel program’s execution are such that for each memory location, there is a hypothetical serial order of all program operations (executed by all processors) to the location that is consistent with the results of execution.
与某一个serial的内存访问顺序的结果一致
Said differently
Definition: A memory system is coherent if
- obeys program order: 一个processor先write再read一定读到新值
- write-propagation: P1先write,一段时间后(suffciently separated in time) P2再read,则P2一定读到新值。注意此处需要相隔多久并没有定义。
- write serialization: 两个processor写入同一个位置,则大家都必须agree on one order, 大家都同意这个顺序
可以用软件或硬件的方法解决
软件解法:OS采用page fault来propagate writes
硬件解法:Snooping based (本节课), Directory-based (下节课)
Snooping
Cache controllers monitor (snoop) memory operations.
任意一个processor修改cache都会broadcast通知其它所有人
现在cache controller不仅需要响应处理器,还需要响应其它cache的broadcast
Assume write-through:
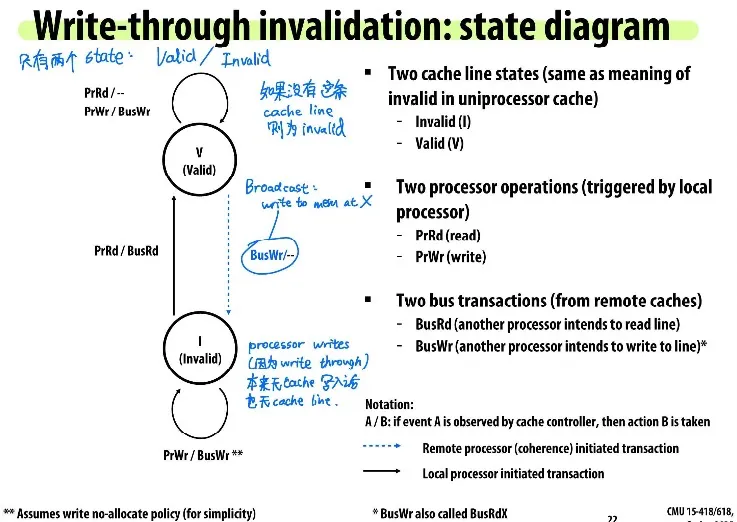
Write-through is inefficient: 因为每次write操作都需要写入内存,也是因为此原因write-through不常见
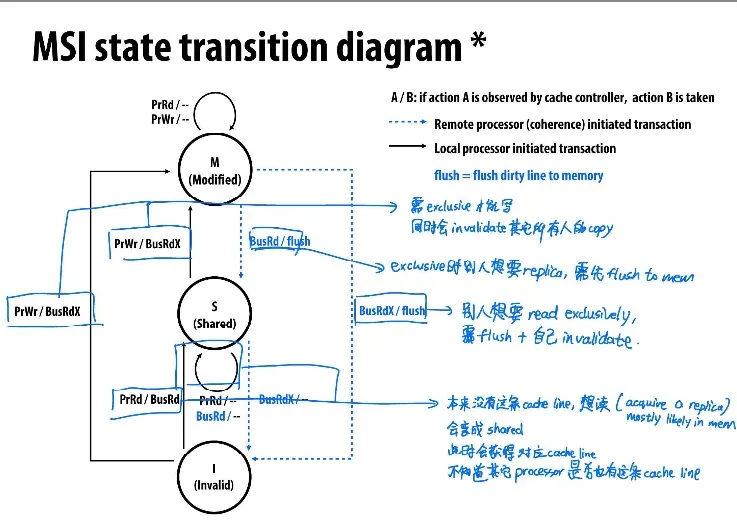
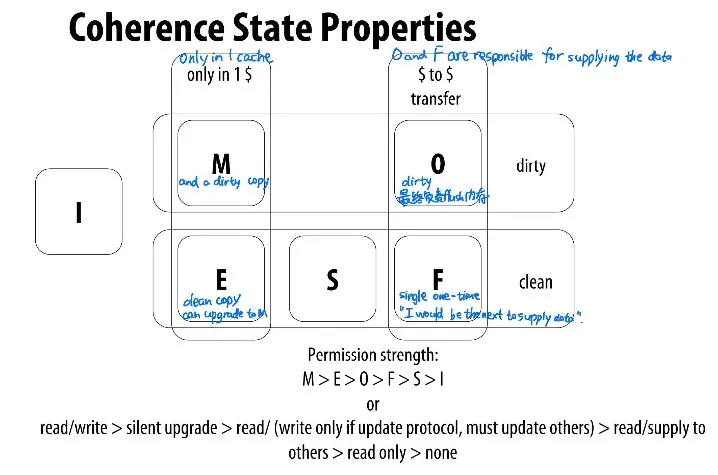
MSI write-back invalidation protocol
Cache line加上dirty bit,如果dirty bit=1,代表处理器拥有这条cache line的exclusive ownership (Dirty = Exclusive)
如果其它processor想读同一条cache line,能从具有exclusive ownership的processor的cache中读(owner is responsible for supplying the line to other processors)
Processor也只能写入M-state的cache line; Processor能随时修改M-state的cache line不用通知他人
Cache controller监听是否有别人想要exclusive access,如果有,则自己必须要invalidate
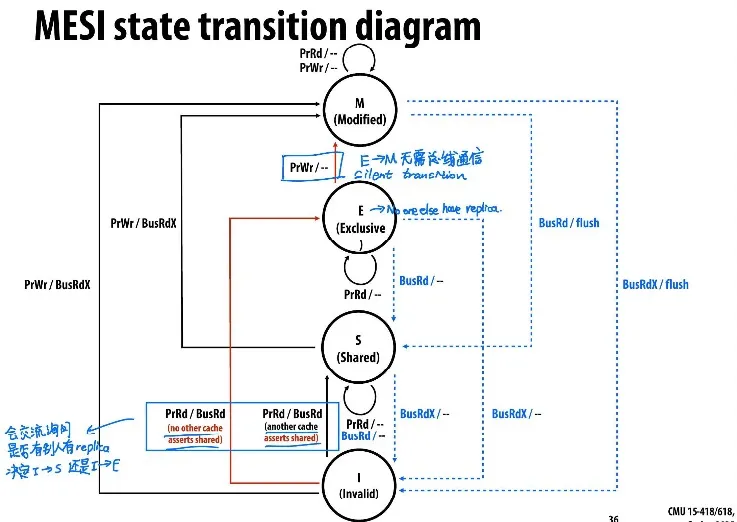
MESI invalidation protocol
在MSI中read会有两种情况
- BusRd: 从I转成S,即使并没有真正shared
- BusRdX: 从S转成M
添加一个新的E-state (exclusive clean) 代表exclusive但尚未修改
读取时询问别的cache有没有这条cache line,如果别人也有则从I进S,否则从I进E
从E升级到M不需要通知他人
Other (MESIF, MOESI)
- MESIF: F = Forward
- 类似与MESI,但是在多个cache都shared的时候,有一个cache不在S而在F
- F holded my most recent requester
- F负责service miss(给别人提供数据),作为对比,MESI中所有S都会做出响应
- I不能直接进入S,你要么进E(如果没人有), 要么进F(别人也有cache,但你是most recent requester所以你要负责给别的cache line提供data)。E和F随后有可能进入S。
- Intel处理器用的是MESIF
- MOESI: O = Owned but Not Exclusive
- 在MESI中,从M转成S需要flush to memory,MOESI添加O-state,从M转成O但不flush内存
- 在O时,这条cache line负责给别人提供data,但不flush进内存
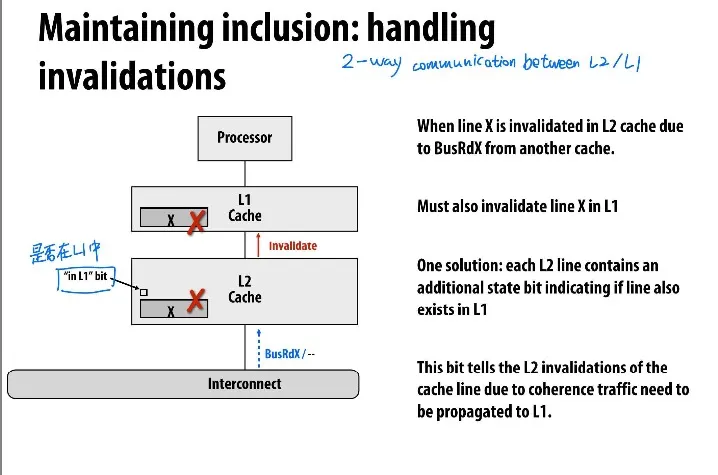
Inclusive property
L1 L2 L3多级缓存
如果让所有L1缓存间和L2缓存间都interconnecting,那么效率低,所以让L2之间interconnect,并让L2 inclusive,即L2缓存中包含所有L1缓存,由L2控制L1的invalidate等
Inclusive property of caches: all lines in closer (to processor) cache are also in farther (from processor) cache. e.g. contents of L1 are a subset of L2
如果单纯让L2比L1大,不能自动保证inclusion
需要让L1和L2相互交流,L2中维护一个“是否在L1中”的bit
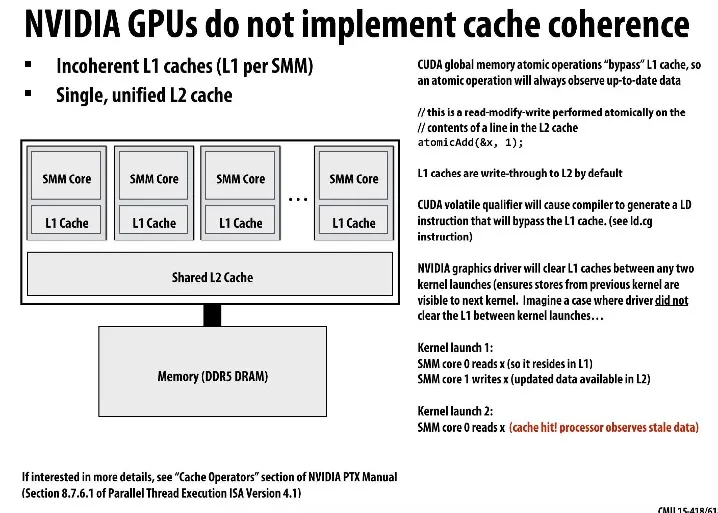
GPU don’t have cache coherence
每个cache都必须监听并对所有broadcast做出反应,这样interconnect开销会随着processor数量增长而增长
所以Nvidia GPU没有cache coherence,而是用atomic memory operation绕过L1 cache访问global memory
Lec 13. Directory-based Cache coherence
上一节课讲Snooping
Snooping-based cache coherence需要依赖broadcast工作,每次cache miss时都要与其它所有cache通信
存在scalability问题
One possible solution: hierarcical snooping。缺点是root会成为瓶颈;延迟;不能用于不同的拓扑结构
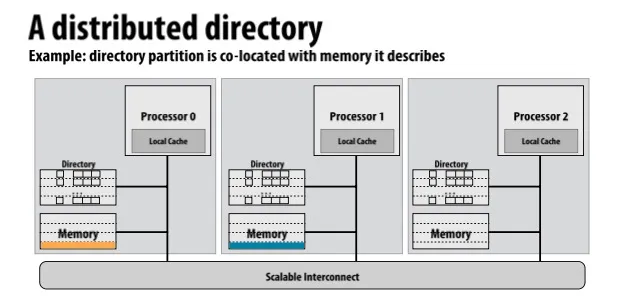
Scalable cache coherence using Directories
在一个地方存directory,每条cache line的directory信息存储着所有cache中这条cache line的状态
用point-to-point messages代替broadcast来传数据
Directory中包含 dirty bit 和 presence bit, 第k个presence bit代表第k个processor是否有这条cache line
Distributed directory: directory与memory大小同步增长
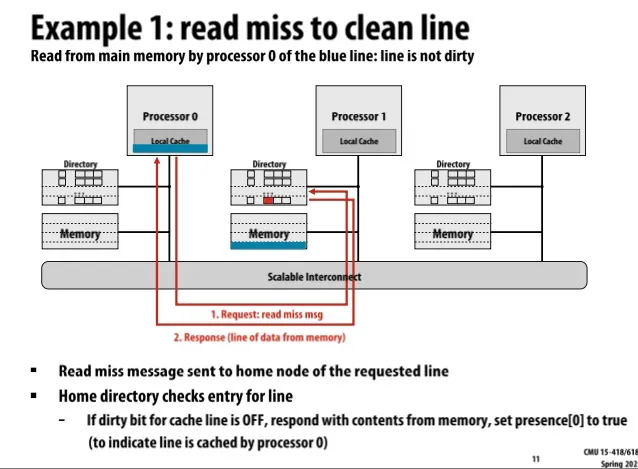
Example 1: Read miss to clean line
Processor 0把位于1的内存数据读到了自己的local cache 里,对应的directory记录P0有值
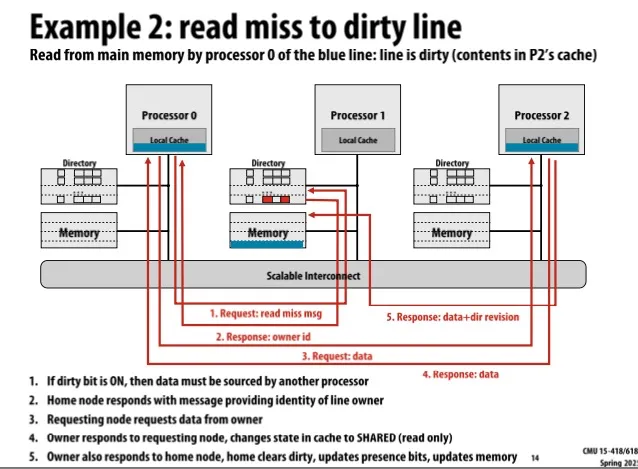
Example 2: Read miss to dirty line
本来P2的local cache中有dirty的数据
P0想读,发送read miss消息,P1告诉P0目前P2有dirty数据,P0收到后去向P2请求数据,P2将数据发给P0并将状态设置为shared,位置1的directory presence bit记录目前P0和P2有数据
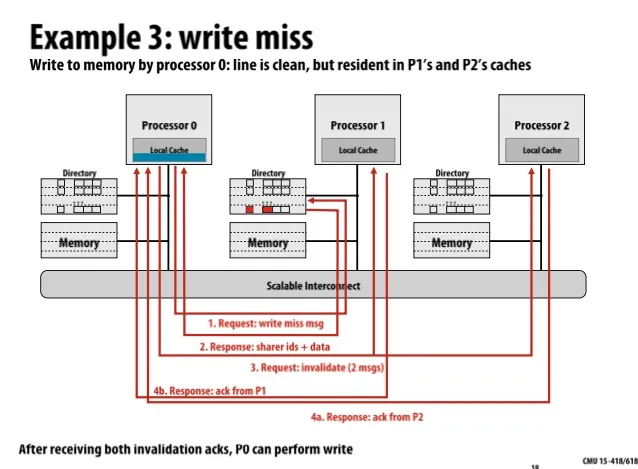
Example 3: Write miss
P0有一条cache line,将要写入这条cache line,因此先请求找出有哪些Processor目前有这条cache line(找出sharer ids)然后向它们(P1和P2)发送invalidate请求,收到P1和P2的ack之后代表它们两个已经invalidate,此时再进行写入内存操作。
Advantage of directories:
- 在read时,directory能直接告诉节点应该去问谁要数据,仅需要点对点通信:如果line is clean, 从home node要;如果line is dirty, 从owner node要。
- 在write时,directory告诉sharer id,工作量取决于有多少节点在共享数据。极端情况,如果所有cache都在共享数据,则需要与所有节点通信,像broadcast一样。
Limited pointer schemes
presense bit需要占用存储空间,会导致storage overhead
Reducing storage overhead
- increase cache line size: 让占比减小(M减小)
- group multiple processors into a single directory node (让P减小)
- 除此之外还能使用 limited pointer scheme (降低P) 和 sparse directories
Limited pointer schemes: 只存指针(指针=processor的id)
如果指针溢出,有几种不同的实际方法
- 指针溢出时改为broadcast(添加一个additional bit代表指针不够用)
- 设置最大共享者数量,不允许超出,如果超出,老的sharer被移除
- 指针溢出时改为bit vector representation
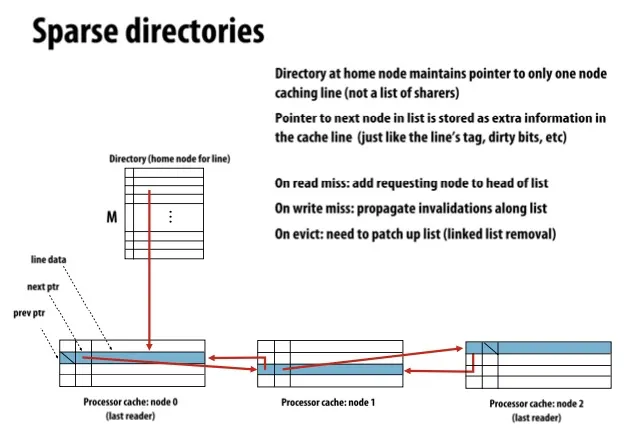
Sparse directories
Key observation: majority of memory is NOT resident in cache.
Sparse directories只存一个指针,而在processor的cache line上存prev和next指针
优化:Intervention forwarding, Request forwarding
Lec 16. Memory Consistency
Correct behaviour for a parallel memory hierarchy: reading should return the lastest value written (by any thread) (write之后read一定要读出最新的结果)
注:因为write的结果只有在read发生时才能看见,所以我们只关注write之后的read
问题: latest 的定义是什么?单线程很好定义,但多线程不一定
- e.g. 如果处理器之间通信需要10个周期,那么p1读2时钟周期前p0写入的值,如何获知p0改过值?类似于,你看见的星星是100秒前的
因此重新给出一个定义:
writes from any particular thread must be consistent with program order 对于一个线程的所有write,顺序必须相同
across threads: writes must be consistent with a valid interleaving of threads
(是hypothetical的interleaving,并非真实存在的interleaving)
像是有一个指针,同时只能指向一个处理器
为什么memory consistency复杂?
- 处理器为了hide memory latency会对指令重排序,单线程没问题,多线程会导致错误
- write buffer在多核下会导致错误
TODO:
关键词: twist (气球间添加twist)
MFENCE
Lec 17. Heterogeneous Parallel & Hardware Specialization
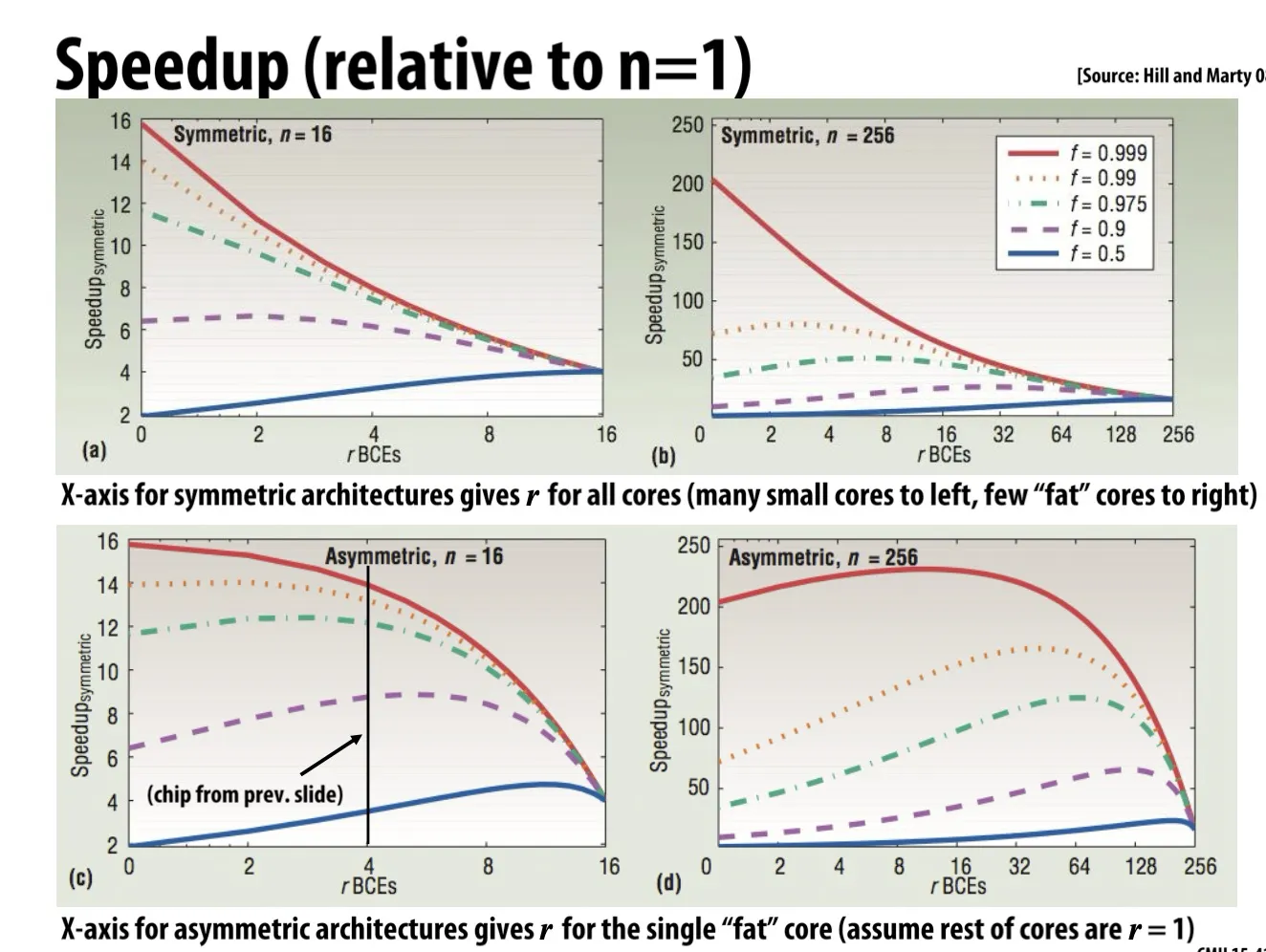
Recap: Amdahl’s law
: 程序中可parallelizable部分的占比
- : 处理器数量
Rewrite Aldahl’s Law in terms of resource limits
- : 程序中可parallelizable部分的占比
- : 总共的处理器资源
- : 每个处理器核心所能分配到的资源
- 假设每个 核心顺序执行的性能为
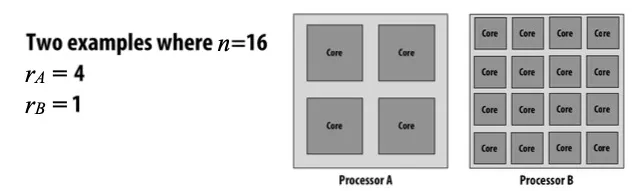
- Example: 上面这两张图total processing resources n都等于16,左图r=4,右图r=1
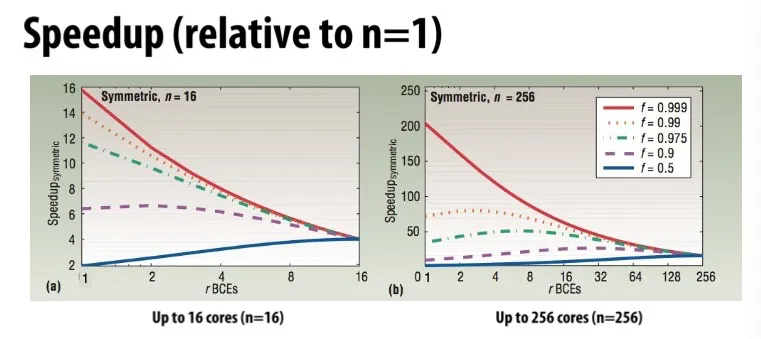
上图的例子
- 横坐标为, 代表每个核心占多大面积。总面积固定 (total chip resources keeps same),越往左代表每个核心越小,核心数量越多 (many small cores),越往右代表每个核心越大,核心数量越少 (fewer fatter cores)
- 不同线对应不同的 值(程序可并行部分的占比)
- 纵坐标是相比于 的单核处理器的speedup
- 课堂quiz题:为什么上面的图都converge到一点?因为r足够大的时候处理器只有一颗核心,所以不管f是多少执行结果都全部相同
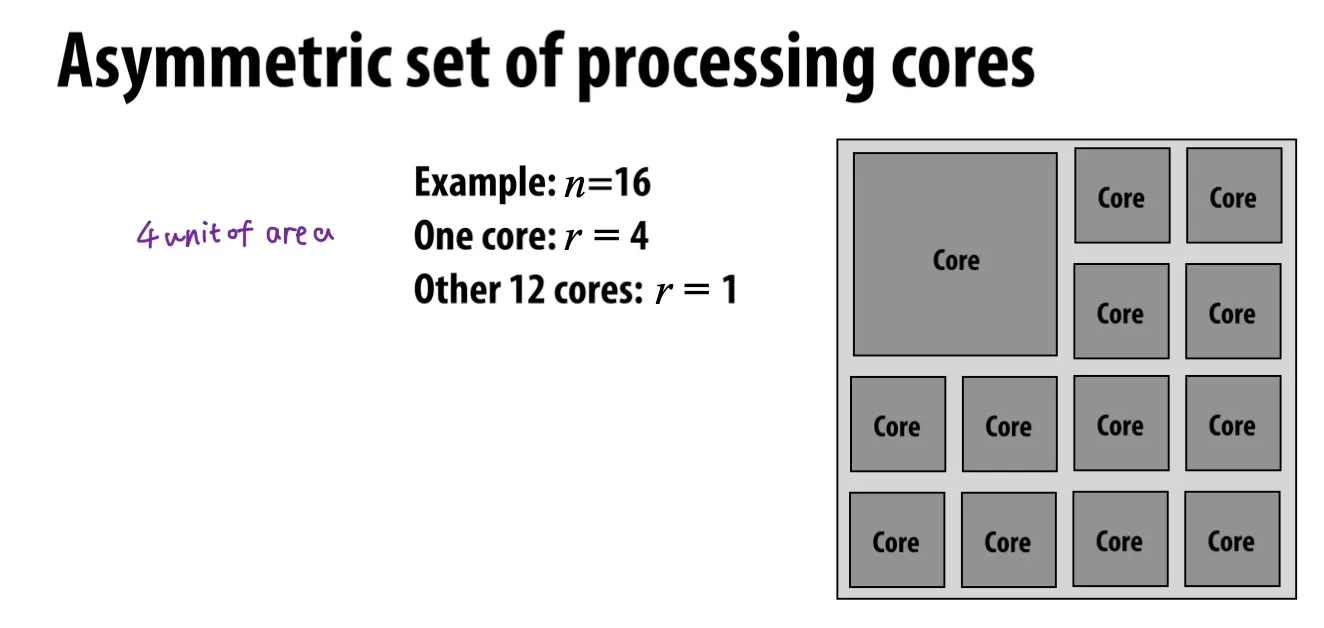
上面的例子:, 有一颗的大核,剩下12颗的小核
分母的意思是:一颗的处理器 + 颗的处理器
Heterogeneous processing 异构处理器
Observation: real world applications 的 workload characteristics 特性不同
- 例如:有的部分能并行,有的不行;有的部分能使用SIMD,有的不行,因为divergent control flow;有的部分具有predictable data access,有的不行
Idea: 最高效的处理器是 heterogeneous mixture of resources
Energy-contrained computing
Tradeoff: efficiency and programmability
- debug更难,例如在GPU上debug就比在CPU上难
- FPGA: efficient, 但难以program
- ASIC (例如硬件video解码器): 更加efficient,但不能program,且需要大量资金来design/verify/create
Challenges of heterogeneous designs
到目前为止,目标是: keep all processors busy all the time
Heterogeneous的目标是:use preferred processor for each task
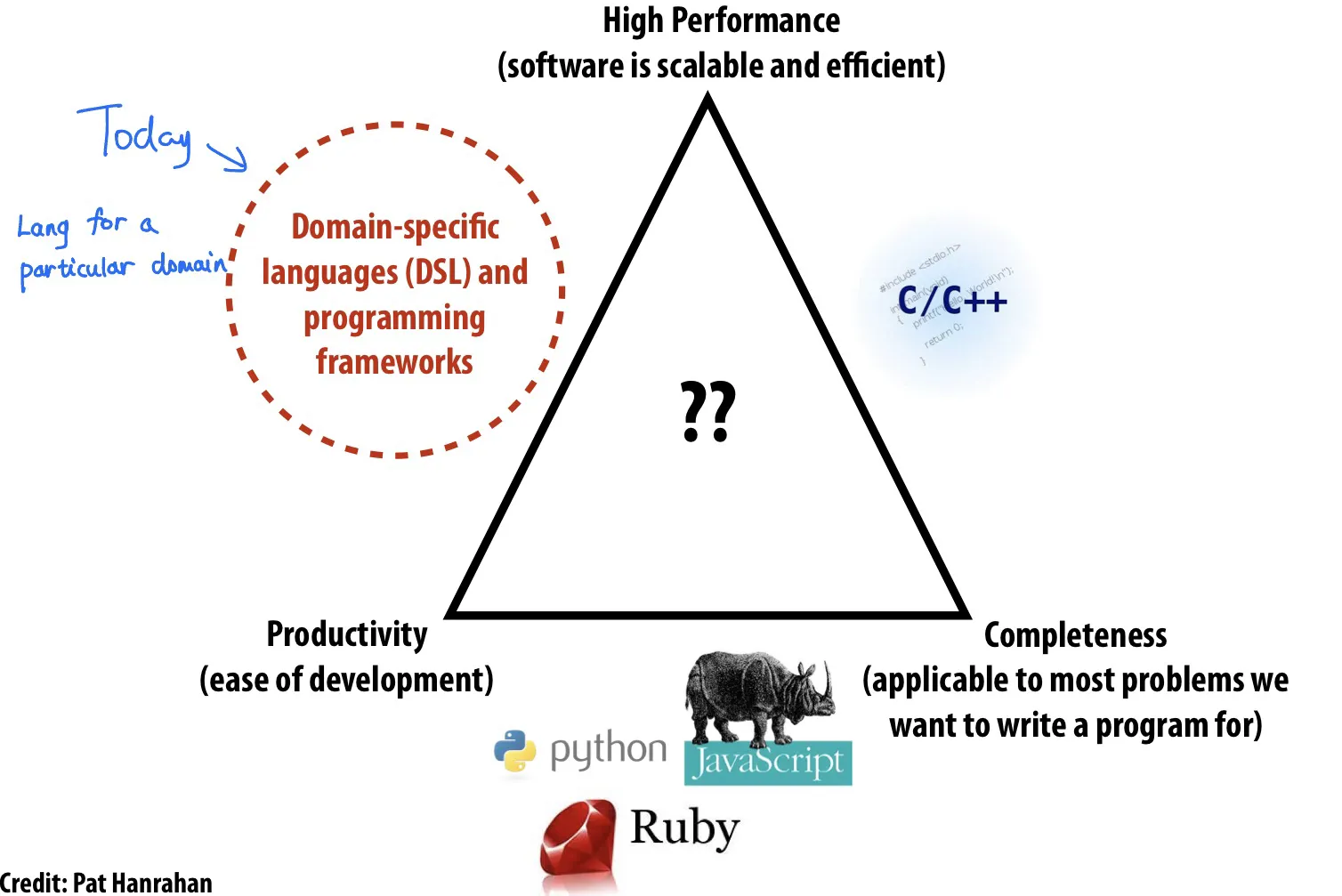
Lec 18. Domain-specific Programming
不可能三角: 高性能、通用性(完整性)、方便编程,三个里面只能选两个
Domain-specific languages (DSL) 选择了high performance和productivity,代价是失去了generality/completeness (不能作为general purpose)
Example 1: Lizst
对mesh做操作的一种编程语言
程序员不负责implement the mesh.
程序员指定mesh的类型(regular, irregular)和topology拓扑结构,编译器根据程序员想对mesh做的操作来选择如何represent the mesh.
为了生成能parallelizable的代码,lizst编程语言和编译器做了这些事
- identify parallelism: 做dependency analysis, 没有dependency的代码可以同时执行
- identify data locality: 如果有dependency则bad for parallelism,但是good for locality
- reason about required synchronization
Example 2: Halide
a DSL for image processing
快速生成vectorize (SIMD)和parallel的代码
Lec 19. DSL on graphs
设计图计算的系统programming system需要考虑什么
- what are the fundamental operations we want to be easy to express and efficient to execute
- what are the key optimizations performed by the best implementations of these operations
Graph computation的例子: Page Rank
经典的iterative graph algorithm, 用于计算网页重要性,节点为网页,边为网页链接
GraphLab: 用于描述iterative computations on graphs的系统。提供C++ runtime
GAS (Gather-Apply-Scatter) 模型
Gather 收集: 从邻居节点收集信息
Apply 应用: 更新当前节点的值
Scatter 散布: 将新的值更新至邻居节点或边上
GraphLab的调度机制
- Synchronous: 每轮更新全部节点
- Dynamic: 节点动态发出信号signal,根据需求进行更新
GraphLab提供不同的consistency models 一致性模型
- Full Consistency
- Edge Consistency
- Vertex Consistency
性能优化:瓶颈在于访存而非计算(aritimetic intensity低), 因此主要策略有
- Graph Reorganization 图结构重组:提高locality
- Graph Compression 图压缩
Lec 20 Part1. Implement Message Passing
Threads拥有private address spaces, 只能够通过send/receive messages来通信
硬件不需要实现system-wide loads and stores.
能够通过将commodity systems连接起来形成巨大的parallel machine (message passing is a programming model for clusters)
Message Passing Implementation Options
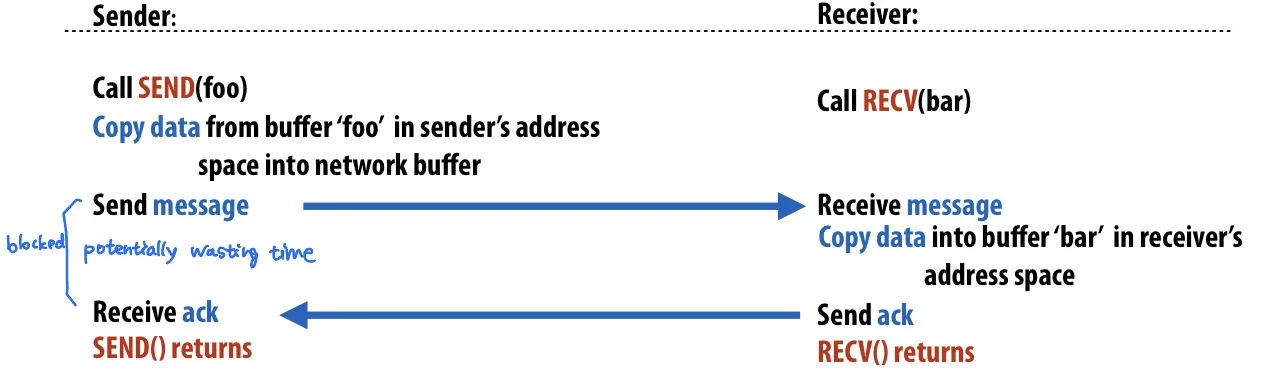
synchronous
- send操作在匹配的接收操作完成后才结束
- receive操作在所有数据传输完成之后才结束
- 接收方没有contention,不需要buffering
asychronous
send completes after send buffer may be reused
分为optimistic和conservative
optimistic: 发送端不需要等待接收端响应即可完成发送操作,但可能需要额外的缓冲空间
接收方接收时,如果失败,则allocate data buffer
好处:发送方不会因为等待接收方准备而stall
坏处:可能需要message layer有额外的存储空间
conservative: 需要接收方先准备好,发送方才会发送数据,避免缓冲区溢出问题
发送方先发送send-ready request (assume fail), 接收方回复receive-ready request, 然后再开始真正的传数据
Optimistic对短消息友好(低延迟), 但Conservative整体上更安全(不会出现buffer overflow)
Hybrid approach: Credit-Based Async Message Passing
发送方预先分配有限的缓冲空间(credit),只有确认有足够的credit时才会optimistically发送数据,否则采取conservative的方式
Tracking credit limit的方式:
发送方拥有一定数量的credit,每发送一个消息都会消耗一定的信用
当接收方处理完消息、释放出缓冲区空间(增加了可用credit)后,不会单独向发送方发送专门的信用更新消息,而是将这些信用更新信息piggyback在返回给发送方的其他消息之中(减少发送消息的数量)
Challenge: avoiding fetch deadlock
deadlock: 每个节点都需要持续接收消息,即使自己已经不能再发送新的消息。
如果接收到的transaction消息是一个request,那么需要发送response,但因为buffer满了无法发送出去,就会导致fetch deadlock请求死锁
Approaches:
Logically independent request/reply networks
将请求和响应信息使用不同的通道或网络分别传输
即使reply通道堵塞,request通道也不受影响,可以继续接收请求
实现方法可通过physical networks(物理独立网络)和virtual channels(同一个物理网络上划分多个逻辑队列)
Bound requests and reserve input buffer space
主动限制每个节点能同时接收的请求数目
假如共有P个节点,每个节点最多接收K个请求,则最多需要为每个节点预留 K(P-1)个request的buffer,还需要额外预留K个response的buffer
NACK on input buffer full
节点buffer overflow不能接收新消息,会告诉发送方NACK (negative acknowledge)告知自己满了
Lec 20 Part 2. Implement Parallel Runtimes
pthread, OpenMP, cilk
Lec 21. Synchronization
锁的实现
busy waiting / spinning: 循环等待。如果scheduling overhead大于预计等待时间则spin更好
blocking: 如果卡住了就block,让OS de-schedule这个thread
test-and-set lock:
lock:
ts R0, mem; bnz R0, lock; unlock:st mem, 0问题:拿锁失败的过程需要读取内存,造成bus contention (high interconnect traffic, poor scaling)
test and test-and-set lock:
1
2
3
4
5
6
7
8
9void Lock(int *lock) {
while (1) {
while (*lock != 0); // 当别人占用锁时等待
if (test_and_set(*lock) == 0) return; // 当锁被释放时完成lock
}
}
void Unlock(volatile int *lock) {
*lock = 0;
}在uncontended时会有略高的latency,因为需要test然后再test-and-set,但是由于中间尝试拿锁只需要读local cache,所以会有显著更少的interconnect traffic
test-and-set with back off
contention时有更高的latency
traffic更少,scalability因此也会更好,但是会有严重的不公平(新来的request back off时间短)
ticket lock: 解决锁释放时大家一拥而上的问题,lock时++next_ticket, 当now_serving轮到自己时才会拿锁
array-based lock: 让每个processor在不同的内存地址spin
queue-based lock (MCS lock): 创建waiter的队列(链表)建立global lock和my lock (local)
Barrier的实现
普通的shared counter barrier存在问题:第一次barrier没问题,但是有人还没离开barrier又看到flag=0一直睡死 (类比:一堆人跑到了终点线睡觉,最后到的一个不睡觉,把flag的0翻成1,所有人看到1之后又起跑,第一个跑到下一终点线的把1重置回0,但是这时候可能有人还没起床,永远看不到flag变成1睡死在那里)
解决方法:增加leave_counter
sense reversal: one spin instead of two. 不要等待flag变成某个固定值 (如 1),而是等待flag的值发生改变 (change)。利用 flag 的两个状态(0 和 1)来区分连续的barrier。每个线程需要维护local sense,记录它期望在当前屏障实例中看到的flag值
Lec 22. Lock-free
Problem: lock can be big and expensive
C++11 atomic<T>: 使用mutex或处理器硬件原子指令(如果T是基本类型). 使用.is_lock_free() 查看是否atomicity的implementation是无锁的
Linkedlist例子
- global lock
- fine-grained lock
- Challenge: deadlock? livelock?
- Costs: overhead of locks, extra storage cost
Lock-free data structures
Blocking algorithms/data structures: 一个线程能够防止其它线程完成操作. 只要算法使用了locks就是blocking的,无论锁的实现是spinning还是pre-emption.
Non-blocking algorithms are lock-free if: some thread is guaranteed to make progress
Lec 23. Transactional Memory
Atomic construct is declarative: programmer states what to do (保证一块区域的原子性), not how to do.
Transaction memory ™: sequence of mem operations. Inspired by DB.
- Atomicity: All (if commits) or nothing (if aborts).
- Isolation: Commit之前别的processor都看不到任何写入操作
- Serializability: 与某个顺序执行的结果一致
Load-linked, store conditional (LL/SC): lite version of TM
- pair of instructions (而不是一条原子指令,不像CAS)
load_linked(x)加载内存地址,store_conditional如果x在上次LL指令之后没有被写入过,则写入内存
Failure atomic: locks (发生exceptions时会发生什么)
- programmer需要决定如何写undo code
- undo code之前也有可能被别人看到错误的中间值
使用transactions则会由系统自动管理这些exceptions
Composability:
e.g. 函数 transfer(A,B,amount) {lock(A), lock(B), ...}
如果 transfer(x,y,100) 和 transfer(y,x,100) 同时运行会死锁
Coarse-grained lock: poor performance
Fine-grain lock: good performance, but may have deadlock
Advantages (promise) of TM:
easy to use synchronization construct
programmer如果要正确实现synchronization比较复杂,但transactional memory用起来和corase-grain lock一样简单
often performs as well as fine-grained locks
自动实现read-read序列化和fine-grained concurrency. Performance较好,易于开发
failure atomicity and recovery, composability (不用担心failure scenerios)
Atomic != lock+unlock
- atomic: 只是一个high-level declaration, 没有决定如何实现.
- Lock可以用来实现atomic,也可以用于除了atomicity以外的用途
- programmer mistake:如果atomic的区域被错误分割成了两块atomic则中间可能被别人修改
Implementing Transactional Memory ™
TM需要提供atomicity和isolation.
Basic implementation: 需要data versioning(来支持回滚);冲突检测和解决机制(什么时候abort)
分为硬件TM(HTM),软件TM(STM)和Hybrid TM (例如硬件加速的STM)
Data Versioning
- eager versioning (undo-log based): 立即更新内存,保存undo log以备abort用
- faster commit, slower aborts, fault tolerance issues (transaction中间发生crash)
- lazy versioning (write-buffer based): 只写入到write buffer内,在commit成功时flush buffer
- faster abort, slower commit, no fault tolerance issues
Conflict detection
read-write conflict: A读X,B有一个pending transaction写入X
write-write conflict: A和B都在pending且都想写入X
系统需要追踪一个transaction的read set和write set
pessimistic detection: load和store时检测conflict
- good: detect conflicts early (更少的undo, 一部分abort会转为stall)
- bad: no progress guarantee, fine-grained communication, detection on critical path
optimistic detection: 当尝试commit的时候检测conflict(使用硬件cache coherence检测)。有冲突时committing transaction有优先权
- good: forward progress guarantees; bulk communication & conflict detection
- bad: detects conflicts late; fairness problems
Hardware transactional memory (HTM)
data versioning is implemented in caches (cache the write buffer or the undo log)
- 一条cache line有MESI state, 和R bit, W bit (read set, write set). 此处的R和W可以选择word或cache-line作为granularity单位
- 例如intel haswell: 有硬件指令 xbegin, xend, xabort. Xbegin将指针设置为fallback address, 在abort发生时回退指针。注意progress is not guaranteed (even if no other threads), 因为处理有很多原因会abort,包括cache line被evict。
TSX doesn’t guarantee progress
- transaction有很多原因会失败。fallback path仍然需要锁。
- TSX只能跟踪有限数量的内存位置(minimize memory touched).
Lec 25. Parallel DNN
Parallel Deep Neural Networks
CNN (Convolutional neural networks) 卷积
有一堆卷积的filter, 同时对image应用这么多卷积核
卷积可以用矩阵乘法来算(卷积核视为一维数组,每个卷积核代表一列)
普通的3层for循环的dense matrix multiplication的arithmetic intensity很低
改为blocked dense matrix multiplication会更好(计算量不变,缓存命中率更好)
reducing network footprint
例如VGG,末尾的几个全连接层因为fully connected所以很大,model parameters太多会造成负担
压缩network的方法
prune low-weight links: model训练完之后会有很多0和接近0的值,90%的值拿掉不会显著影响精度;将参数矩阵存为compressed sparse row (CSR)格式
weight sharing: 相近的数值可以合并,让所有参数共享a small set of weights
将weights (32-bit浮点)变为cluster index(2-bit 代号)和centroids(2-bit代号到浮点数值的映射表)
huffman encode quantized weights and CSR indices
上面说的是evaluation, 下面说training
training比evaluation明显更耗资源
data-parallel training
across images: 每个核心有完整的model的copy. 两个核心对不同的image做训练,加barrier把梯度相加
Asynchronous parameter update: 引入parameter server
首先parameter server向大家分发parameter values, 同时divide training image set (让每个node拿到完整model和一部分训练集),如果有节点训练完成则向parameter server发送subgradient,让server的参数得到更新
avoid global sync on all parameter updates between each SGD iteration
好处: 没有barrier;坏处:loss不好,影响SGD的收敛,实测效果不好、
parameter server会成为瓶颈 ==> 通过将parameter server分开来可以缓解
model parallelism
- 如果一个节点放不下model如何处理?
Lec 26. Parallel DNN part 2
AllReduce
Allreduce: perform element-wise reduction across multiple devices
例如:有四块GPU,每块GPU有一部分result,现在要把这四块result加起来并且让所有人都拿到最终结果
(Parameter Server):
Naive AllReduce: 每个worker发送自己的gradient给其它所有邻居
假设有N个worker, 每个worker有M个参数, 那么总共需要发送 个parameter
communication复杂度很高
Ring AllReduce: 将M个参数分成N个slice,分aggregation和broadcast两步
aggregation: 同一时刻,每个worker发送一个slice给别人,收到别人的slice后加起来,重复N次
e.g. A发a0给B,B发b1给C…
broadcast: 每个worker发送一个aggregated slice给别人,重复N次
总的communication需要发送 个parameter,其中aggreation和broadcast各占
Tree AllReduce: 树状结构,同样分aggregation和broadcast两步
aggregation: 每人发M个参数给parent,重复log N次(tree height)
broadcast: 每人发送M个参数给所有的children,重复log N次
Overall communication同上
Butterfly AllReduce: 使用butterfly network。重复logN次
Overall communication为
同样是 , Ring Allreduce表现比parameter server和tree allreduce都更好
Ring的latency最低,分配任务最平均,scale well
每个worker每个iteration发送M/N个参数,重复2N个iteration,latency =
在N变得很大的时候,latency为2M,N消失了,代表latency和机器数量无关
通俗理解为,在机器数量变多的时候,因为slice变小,需要发送的量也会变小
Model Parallelism
如果一个节点放不下model如何处理?
将一个model split开来放在不同的GPU上做
不同的运算可以选择使用data parallelism或model parallelism
Convolutional layers: 大量计算时长占比,少量parameters,大量中间结果 ==> Data parallelism
Fully-connected layers: 少量计算时长占比,大量parameters(不想频繁为了parameters通信) ==> Model parallelism
Pipeline parallelism
因为放在了不同的GPU上运行导致出现三角形空隙,所以pipeline(pipeline无法彻底解决空隙问题,只能缓解)
一些基础知识
ISPC
ISPC代码调用时会生成多个program instances, 可以利用 programCount 和 programIndex 来获取instance总数和当前instance编号。
uniform 表示在一个SIMD程序块中,变量对所有SIMD通道都是相同的值。仅仅是一种优化,不影响正确性(因为uniform变量只需要加载一次或执行一次,编译器可以做出优化,不加uniform可能造成不必要的重复计算)。
非uniform (varying) 表示变量在不同SIMD通道可能有不同的值。
所以说 programCount 是 uniform, programIndex 是 varying.
ISPC可以通过tasks来实现多核加速,利用多线程。
Contrary to threads, tasks do not have execution context and they are only pieces of work. ISPC编译器接受tasks并自行决定启动多少个threads。
通常我们应该启动比cpu逻辑线程数更多的tasks数量,但也不要太多,否则会有scheduling的overhead。
task自带 taskIndex。
CUDA
host是CPU, device是GPU
__device__: 在device上执行,只能在device中调用
__global__: 在device上执行,只能在host中调用。叫做kernel,返回值必须是void
__host__: 在host上执行且只能在host上调用
cudaMemcpy(dst, src, size, cudaMemcpyDeviceToHost)
Threads, Blocks, Grids
threads grouped into blocks
需要指明blocks的数量,和每个block中threads的数量。
假设n是总的threads数量, t是每个block中threads的数量。
KernelFunction<<<ceil(n/t), t>>>(args)
每一个thread都会运行同样的kernel,每一个thread由blockID和这个block中的threadID来标识。
Example:
1 | |
注: 为什么cudaMalloc第一个参数是二级指针,而不直接使用返回值来赋值给指针?
因为 cudaMalloc 的返回值已经用来返回 cudaError_t。
grid和blocks可以是1D, 2D, 3D的。上面这个例子是1D,所以是".x"
2D的例子:假设要把一个WIDTH x WIDTH的矩阵P分成几块。
WIDTH=8, TILE_WIDTH为2的话,就是把8x8的矩阵分成16个小块(grid),每一个小块大小是2x2(4个thread)。
1 | |
每一个thread可以用以下方式来标识
1 | |
为什么用两层threads?因为组成多个grid的thread blocks比一个很大的单个thread block更好管理。
GPU有很多很多核心,核心group成SM(streaming multiprocessors),每一组SM有自己的内存和调度。
GPU不同时启动所有100万个threads,而是把大约1000个thread装进一个block里,并分发给SM。
assign给SM的thread block会使用SM的资源(寄存器和共享内存)。这些资源已经pre-allocated,且由于寄存器数量很多,在切换threads时不需要register flush。
不同的block可以用任何顺序运行,因此不能assume block2在block1之后运行。如果真的要这么做,需要放在不同的kernel里(启动kernel比较耗资源)
同一个block中的thread可以使用 __syncthreads() 来做barrier synchronization。
但是通常不建议使用 __syncthreads()
如何选择合适的block size?
- Consideration 1: hardware constraints
- 例如:每一个SM分配小于1536个thread,小于8个block;每一个block小于512个thread
- Consideration 2: complexity of each thread
- Consideration 3: thread work imbalance.
GPU memory
Global memory很慢,所以同时运行大量线程,线程因为内存IO卡住的时候切换其它线程,这是massive multi-threading (MMT).
这样总的throughput很高,即使每个thread的延迟也很高。
每个SM有自己的scheduler,每个SM存储了所有thread的context(PC, reg等),所以SM内能做到零开销线程切换。同时,SM scheduler有一个scoreboard追踪哪些thread是blocked/unblocked,所以SM有大约30个核但可以运行大约1000个线程。
Tiled MM是一种进行矩阵乘法 内存友好的方法。
CUDA类型关键词
__device__ __shared__memory: shared; scope: block; lifetime: block__device__memory: global; scope: grid; lifetime: application__device__ __constant__memory: constant; scope: grid; lifetime: application
Race conditions:
CUDA中难以实现mutex,而且包含critical sections的代码在GPU上本来就运行得不好。
CUDA中有一些原子操作,可以在global或shared memory变量上操作
int atomicInc(int *addr): 加一,返回旧值int atomicAdd(int *addr, int val): 加val, 返回旧值int atomicMax(int *addr, int val): 让*addr=max(*addr, val) 并返回旧值int atomicExch(int *addr1, int val): setint atomicCAS(int *addr, old, new): Compare and swap.if (*addr == old) *addr = new;